-
1 timing period
время работы реле времени
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
выдержка времени
(в реле времени)
[Интент]Параллельные тексты EN-RU
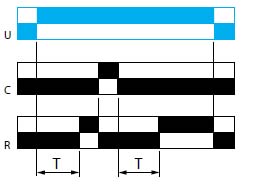
The timing period T starts on energization.
At the end of the timing period T, the output R closes.
Closing of the control contact C makes the output R open.
Opening of control contact C restarts timing period T.
At the end of the timing period T, the output R closes.
[Schneider Electric]Отсчет выдержки времени T начинается от момента подачи питания на реле времени.
По окончании выдержки T выход R замыкается.
При подаче напряжения на управляющий вход C выход R размыкается.
В момент снятия напряжения с управляющего входа C вновь начинается отсчет выдержки T.
По окончании отсчета выдержки времени T выход R замыкается.
[Перевод Интент]
Тематики
Сопутствующие термины
- начало отсчета выдержки времени
- окончание выдержки времени
- отсчет выдержки времени
- прерывание отсчета выдержки времени
EN
Англо-русский словарь нормативно-технической терминологии > timing period
-
2 timing period
1) Техника: тактовый интервал2) Автомобильный термин: такт3) Электротехника: время работы реле времени -
3 operating time
- рабочее время
- продолжительность эксплуатации (наработка)
- наработка
- время срабатывания электрического реле
- время срабатывания
- время работы
- время непрерывной работы
- временной интервал межсервисного обслуживания
время срабатывания
Продолжительность времени или разность времени между любыми двумя электрическими или механическими функциями, выполняемыми управляющим устройством с отсчетом времени в течение автоматического действия.
[ГОСТ IЕС 60730-1-2011]
время срабатывания
Промежуток времени, в течение которого происходит срабатывание арматуры, т.е. перемещение запирающего элемента из одного крайнего положения в другое.
[ ГОСТ Р 52720-2007]
время срабатывания tr
Период времени между моментами начала работы устройства ограничения частоты вращения и срабатыванием двигателя внутреннего сгорания.
[ ГОСТ Р ИСО 8528-2-2007]
время срабатывания
tan
Время, необходимое для срабатывания устройства контроля изоляции при заданных условиях.
[ ГОСТ Р 61557-1-2006]Тематики
- арматура трубопроводная
- электроагрегаты генераторные
- электробезопасность
- электротехника, основные понятия
EN
время срабатывания электрического реле
Время от момента, когда входная воздействующая или характеристическая величина электрического реле, находящегося в начальном или исходном состоянии, принимает в заданных условиях определенное значение до момента, когда реле завершает срабатывание
[ ГОСТ 16022-83]EN
operate time
for a relay which is in the release condition (initial condition) the time interval between the instant a specified value of the input energizing quantity (characteristic quantity) is applied under specified condition and the instant when the relay switches
NOTE – This term is used only when the relay has output circuits of the same type and no precision is required according to contact time difference.
[IEV number 446-17-09]FR
temps de fonctionnement
temps d'action (terme déconseillé, utilisé pour les relais de tout ou rien)
pour un relais qui est dans l'état de repos ou dans un état initial, temps écoulé entre l'instant où la grandeur d'alimentation d'entrée ou la grandeur caractéristique prend, dans des conditions spécifiées, une valeur définie et l'instant où le relais commute
NOTE – Ce terme n'est utilisé que lorsque le relais ne comporte que des circuits de sortie de même nature et qu'aucune précision n'est nécessaire quant à la dispersion des temps de contact.
[IEV number 446-17-09]Тематики
EN
DE
FR
наработка
Продолжительность или объем работы объекта.
Примечание
Наработка может быть как непрерывной величиной (продолжительность работы в часах, километраж пробега и т. п.), так и целочисленной величиной (число рабочих циклов, запусков и т. п.).
[ ГОСТ 27.002-89]
[ОСТ 45.153-99]Тематики
- надежность средств электросвязи
- надежность, основные понятия
EN
продолжительность эксплуатации (наработка)
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
рабочее время
наработка
—
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
Синонимы
EN
4.1. Наработка
Operating time
Продолжительность или объем работы объекта.
Примечание. Наработка может быть как непрерывной величиной (продолжительность работы в часах, километраж пробега и т. п.), так и целочисленной величиной (число рабочих циклов, запусков и т. п.).
Источник: ГОСТ 27.002-89: Надежность в технике. Основные понятия. Термины и определения оригинал документа
3.1.6 время непрерывной работы (operating time): Время непрерывной работы, в течение которого насос для отбора проб может использоваться при заданных значениях расхода и перепада давления без перезарядки или замены элемента питания.
[ЕН 1232]
Источник: ГОСТ Р ИСО 15202-1-2007: Воздух рабочей зоны. Определение содержания металлов и металлоидов в твердых частицах аэрозоля методом атомной эмиссионной спектрометрии с индуктивно связанной плазмой. Часть 1. Отбор проб оригинал документа
временной интервал межсервисного обслуживания (operating time): Время непрерывной работы, в течение которого побудитель расхода для отбора проб может использоваться при заданных значениях расхода и противодавления без перезарядки или замены элемента питания.
[ЕН 1232:1997] [8]
Источник: ГОСТ Р ИСО 20552-2011: Воздух рабочей зоны. Определение паров ртути. Отбор проб с получением амальгамы золота и анализ методом атомной абсорбционной или атомной флуоресцентной спектрометрии оригинал документа
3.1.6 время непрерывной работы (operating time): Интервал времени, в течение которого побудитель расхода можно использовать при заданных значениях расхода и противодавления без перезарядки или замены элемента питания.
[ЕН 1232, пункт 3.36] [2]
Источник: ГОСТ Р ИСО 21438-1-2011: Воздух рабочей зоны. Определение неорганических кислот методом ионной хроматографии. Часть 1. Нелетучие кислоты (серная и фосфорная) оригинал документа
Англо-русский словарь нормативно-технической терминологии > operating time
-
4 directional neutral current relay
направленная токовая защита нулевой последовательности
—
[В.А.Семенов. Англо-русский словарь по релейной защите]Нулевая последовательность фаз.
Согласно теории симметричных составляющих любую несимметричную систему трех токов или напряжений - обозначим их А, В, С - можно представить в виде трех систем прямой, обратной и нулевой последовательностей фаз (рис. 7.9, а-в). Первые две системы симметричны и уравновешены, последняя симметрична, но не уравновешена.
Система прямой последовательности (рис. 7.9, а) состоит из трех вращающихся векторов A 1, B 1, C 1, равных по значению и повернутых на 120° относительно друг друга, причем вектор B1 следует за вектором А 1.
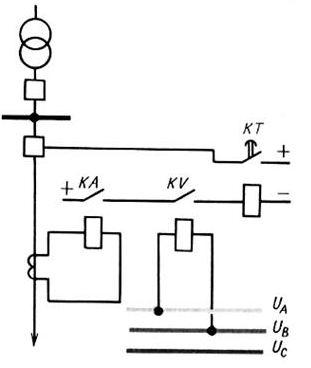
Рис. 7.8. Принципиальная схема максимальной токовой защиты с пуском от реле минимального напряжения:
КА - реле тока (токовый пусковой орган); КV - реле минимального напряжения (пусковой орган по напряжению); КТ - реле времени
Система обратной последовательности (рис. 7.9, б) состоит также из трех векторов A 2, B 2, C 2, равных по значению и повернутых на 120° относительно друг друга, но при вращении в ту же сторону, что и векторы прямой последовательности, вектор B 2 опережает вектор A 2 на 120°.
Система нулевой последовательности (рис. 7.9, в) состоит из трех векторов A 0, B 0, C 0, совпадающих по фазе.
Очевидно, что сложение одноименных векторов этих трех систем дает ту несимметричную систему, которая была разложена на, ее составляющие:

В качестве примера сложение векторов фазы С выполнено на рис. 7.9, г.
Существует и метод расчета симметричных составляющих, согласно которому составляющая нулевой последовательности
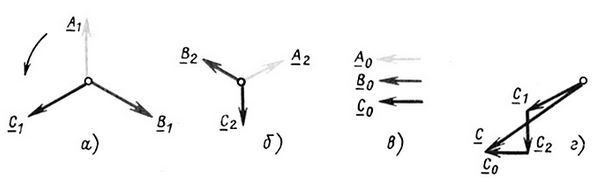
Рис. 7.9. Симметричные составляющие:
а, б, в - прямой, обратной и нулевой последовательности соответственно; г - сложение векторов трех последовательностей фазы С
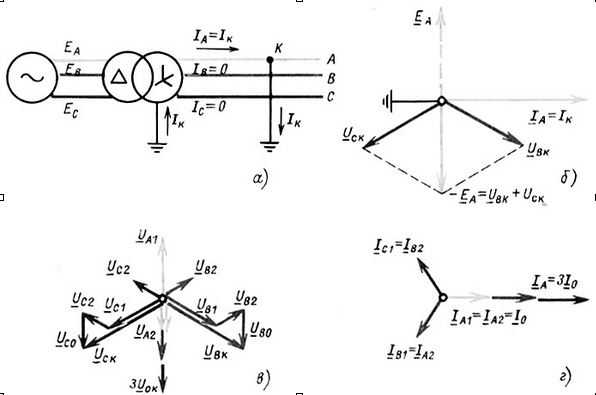
Рис. 7.10. Однофазное КЗ на землю на ненагруженной линии с односторонним питанием:
а - схема линии; б - векторная диаграмма напряжения и тока для точки К ; в, г - векторные диаграммы напряжения и токов, построенные с помощью симметричных составляющихТаким образом, для нахождения A 0 надо геометрически сложить три составляющие вектора и взять одну треть от суммы.
Целесообразность представления несимметричных систем тремя симметричными составляющими состоит в том, что анализ и расчеты напряжений и токов для системы нулевой последовательности могут выполняться независимо от систем прямой и обратной последовательностей, что во многих случаях упрощает расчеты.
Включение же защит на составляющие нулевой последовательности дает ряд преимуществ по сравнению с включением их на полные токи и напряжения фаз для действия при КЗ на землю.
Практическое использование составляющих нулевой последовательности. Рассмотрим металлическое замыкание фазы А на землю в сети с эффективно заземленной нейтралью (рис. 7.10, а). Этот вид повреждения относится к несимметричным КЗ и характеризуется тем, что в замкнутом контуре действует ЭДС E A, под действием которой в поврежденной фазе А проходит ток IA=Ik отстающий от E A на 90°; напряжение фазы А относительно земли в месте повреждения (точка К) UAк =0, так как эта точка непосредственно соединена с землей; токи в неповрежденных фазах IB и IC отсутствуют. С учетом сказанного на рис. 7.10, б построена векторная диаграмма для точки К.
На рис. 7.10, в и г приведены векторные диаграммы напряжений и токов, построенные с помощью симметричных составляющих для того же случая однофазного КЗ.
Сравнение диаграммы, представленной на рис. 7.10, б, с диаграммами рис. 7.10, в и г показывает, что вектор I к равен вектору 3I0, а –ЕА =U B к + U C к = 3U0к. Значит, полный ток фазы в месте повреждения может быть представлен утроенным значением тока нулевой последовательности, а ЭДС - ЕА - утроенным значением напряжения нулевой последовательности.
Практически ток нулевой последовательности получают соединением вторичных обмоток трансформаторов тока в фильтр токов нулевой последовательности (рис. 7.11). Из схемы видно, что ток в реле КА равен геометрической сумме токов трех фаз:

Ток в реле появляется только при однофазном или двухфазном КЗ на землю. Короткие замыкания между фазами являются симметричными системами, и соответственно этому ток в реле Iр=0.
Для получения напряжения нулевой последовательности вторичные обмотки трансформатора напряжения соединяют в разомкнутый треугольник (рис. 7.12) и обязательно заземляют нейтраль его первичной обмотки. В этом случае

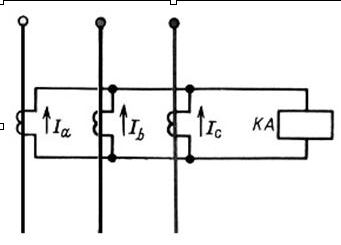
Рис. 7.11. Соединение трансформаторов тока в фильтр токов нулевой последовательности
В нормальном режиме работы и КЗ между фазами (без земли) геометрическая сумма напряжений вторичных обмоток, соединенных в разомкнутый треугольник, равна нулю, и поэтому Up также равно нулю (рис. 7.12, б). И только при однофазных (или двухфазных) КЗ на землю на зажимах разомкнутого треугольника появляется напряжение Up=3U0 (рис. 7.12, в).
Фазные напряжения систем прямой и обратной последовательностей образуют симметричные звезды, и поэтому суммы их векторов в схеме разомкнутого треугольника всегда равны нулю.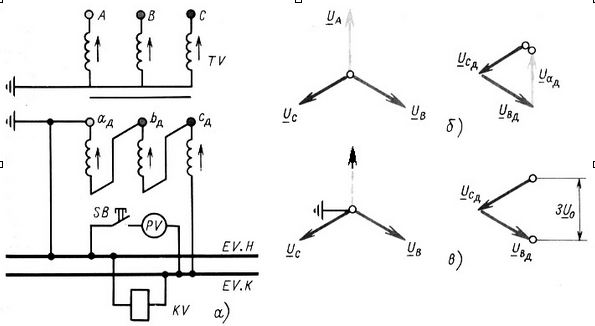
Рис. 7.12. Соединение однофазных трансформаторов напряжении в фильтр напряжения нулевой последовательности:
а - общая схема трансформатора напряжения; б - векторные диаграммы в нормальном режиме работы; с - то же при замыкании фазы А на землю в сети с заземленной нейтралью; PV - вольтметр контроля исправности цепей вторичной обмоткиВ сетях с эффективным заземлением нейтрали около 80% повреждений связано с замыканиями на землю. Для защиты оборудования применяют устройства, реагирующие на составляющие нулевой последовательности.
Схема и некоторые вопросы эксплуатации токовой направленной защиты нулевой последовательности. Принципиальная схема защиты показана на рис. 7.13. Пусковое токовое реле КА, включенное на фильтр токов нулевой последовательности, реагирует на появление КЗ на землю, когда в нулевом проводе проходит ток 3I0.
Реле мощности KW фиксирует направление мощности КЗ, обеспечивая селективность действия: защита работает при направлении мощности КЗ от шин подстанции в защищаемую линию. Напряжение 3U0 подводится к реле мощности от обмотки разомкнутого треугольника трансформатора напряжения (шинки EV, H, KV, K).
Реле времени КТ создает выдержку времени, необходимую по условию селективности.
На рис. 7.14 показано размещение токовых направленных защит нулевой последовательности в сети, работающей с заземленными нейтралями с обеих сторон рассматриваемого участка. График характеристик выдержек времени построен по встречно-ступенчатому принципу. Из графика видно, что каждая защита отстраивается от защиты смежного участка ступенью времени Δt =t1-t3.
Значение тока срабатывания пускового токового реле выбирается по условию надежного действия реле при КЗ в конце следующего (второго) участка сети, а также по условию отстройки от тока небаланса.
Появление тока небаланса в реле связано с погрешностью трансформаторов тока, неидентичностью трансформаторов тока, неидентичностью их характеристик намагничивания и имеет решающее значение. Чтобы не допустить действия пускового токового реле от тока небаланса, ток срабатывания реле принимают больше тока небаланса. Ток небаланса определяется для нормального рабочего режима или для режима трехфазного КЗ в зависимости от выдержки времени защиты.
При наличии в защищаемой сети автотрансформаторов, электрически связывающих сети двух напряжений, однофазное или двухфазное замыкание на землю к сети среднего напряжения приводит к появлению тока I0 в линиях высшего напряжения. Чтобы избежать ложных срабатываний защит линий высшего напряжения, уставки их защит по току срабатывания и выдержкам времени согласуют с уставками защит в сети среднего напряжения. По указанной причине избегают, как правило, заземления нейтралей обмоток звезд высшего и среднего напряжений у одного трансформатора. Заметим также, что у трансформатора со схемой соединения звезда-треугольник замыкание на землю на стороне треугольника не вызывает появления тока I0 на стороне звезды.
Ток I0 появляется в линиях при неполнофазных режимах работы участков сетей. Такие режимы могут быть кратковременными и длительными. От кратковременных неполнофазных режимов, возникающих, например, в цикле ОАПВ линии, а также АПВ при неодновременном включении трех фаз выключателя защиты отстраиваются по току срабатывания или выдержки времени защит принимаются больше, чем время t ОАПВ. При возможных неполнофазных режимах работы линий (например, при пофазном ремонте под напряжением) токовые направленные защиты нулевой последовательности ремонтируемой линии и смежных участков должны проверяться и отстраиваться от несимметрии или выводиться из работы, так как они мало приспособлены для работы в таких условиях.
В процессе эксплуатации токовых защит нулевой последовательности должны строго учитываться все заземленные нейтрали автотрансформаторов и трансформаторов, являющиеся как бы источниками токов нулевой последовательности. Распределение тока I0 в сети определяется исключительно расположением заземленных нейтралей, а не генераторов электростанций.
Контроль исправности цепей напряжения разомкнутого треугольника осуществляется с помощью вольтметра, периодически подключаемого с помощью кнопки SB (см. рис. 7.12). Вольтметр измеряет напряжение небаланса, имеющего значение 1-3 В. При нарушении цепей показание вольтметра пропадает.
Наряду с рассмотренной токовой направленной защитой нулевой последовательности широкое распространение в сетях 110 кВ и выше получили направленные отсечки и ступенчатые защиты пулевой последовательности. Наиболее совершенными являются четырехступенчатые защиты, первая ступень которых обычно выполняется без выдержки времени. Первая и вторая ступени защиты предназначены для действий при замыканиях на землю в пределах защищаемой линии и на шинах противоположной подстанции. Последние ступени выполняют в основном роль резервирования.
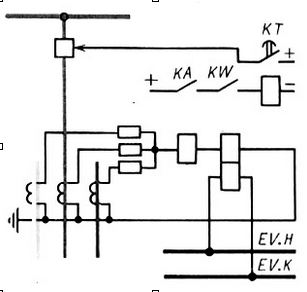
Рис. 7.13. Схема токовой направленной защиты нулевой последовательности
[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-3.html]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > directional neutral current relay
-
5 protection
- степень защиты (обеспечиваемая оболочкой)
- репарация
- релейная защита
- охрана
- защита (в геотекстильных материалах)
- защита
защита
Предотвращение или ограничение местных повреждений элемента или материала путем использования геотекстильного или геотекстилеподобного материала.
[ ГОСТ Р 53225-2008]Тематики
EN
FR
охрана
ограждение
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
Синонимы
EN
защита
Совокупность устройств, предназначенных для обнаружения повреждений или других анормальных режимов в энергосистеме, отключения повреждения, прекращения анормальных режимов и подачи команд или сигналов.
Примечания:
1) Термин «защита» является общим термином для устройств защиты или систем защиты.
2) Термин «защита» может употребляться для описания защиты целой энергосистемы или защиты отдельной установки в энергосистеме, например: защита трансформатора, защита линии, защита генератора.
3) Защита не включает в себя оборудование установки энергосистемы, предназначенное, например, для ограничения перенапряжений в энергосистеме. Однако, она включает в себя оборудование, предназначенное для управления отклонениями напряжения или частоты в энергосистеме, такое как оборудование для автоматического управления реакторами для автоматической разгрузки и т.п.
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
релейная защита
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]
релейная защита
релейная защита электрических систем
Совокупность устройств (или отдельное устройство), содержащая реле и способная реагировать на короткие замыкания (КЗ) в различных элементах электрической системы — автоматически выявлять и отключать поврежденный участок. В ряде случаев Р. з. может реагировать и на др. нарушения нормального режима работы системы (например, на повышение тока, напряжения) — включать сигнализацию или (реже) отключать соответствующий элемент системы. КЗ — основной вид повреждений в электрических системах как по частоте возникновения, так и по масштабам отрицательных последствий. При КЗ наступает резкое и неравномерное понижение напряжения в системе и значительное увеличение тока в отдельных её элементах, что в конечном счёте может привести к прекращению электроснабжения потребителей и разрушению оборудования. Применение Р. з. сводит вредные последствия КЗ к минимуму.
Р. з. срабатывает при изменениях определённых электрических величин. Чаще всего встречается Р. з., реагирующая на повышение тока (токовая защита). Нередко в качестве воздействующей величины используют напряжение. Применяют также Р. з., реагирующую на снижение отношения напряжения к току, которое пропорционально расстоянию (дистанции) от Р. з. до места КЗ (дистанционная защита). Обычно устройства Р. з. изолированы от системы; информация об электрических величинах поступает на них от измерительных трансформаторов тока или напряжения либо от др. измерительных преобразователей.
Как правило, каждый элемент электрической системы (генератор, трансформатор, линию электропередачи и т.д.) оборудуют отдельными устройствами Р. з. Защита системы в целом обеспечивается комплексной селективной Р. з., при этом отключение поврежденного элемента осуществляется вполне определённым устройством Р. з., а остальные устройства, получая информацию о КЗ, не срабатывают. Такая Р. з. должна срабатывать при КЗ, внутренних по отношению к защищаемому элементу, не срабатывать при внешних, а также не срабатывать в отсутствии КЗ.
Селективность (избирательность) Р. з. характеризуется протяжённостью зоны срабатывания защиты (при КЗ в пределах этой зоны Р. з. срабатывает с заданным быстродействием) и видами режимов работы системы, при которых предусматривается её несрабатывание. В зависимости от уровня селективности при внешних КЗ принято делить Р. з. на абсолютно селективные, не срабатывающие при любых внешних КЗ, относительно селективные, срабатывание которых при внешних КЗ предусмотрено только в случае отказа защиты или выключателя смежного поврежденного элемента, и неселективные, срабатывание которых допускается (в целях упрощения) при внешних КЗ в границах некоторой зоны. Наиболее распространены относительно селективные Р. з. Любая Р. з. должна удовлетворять требованиям устойчивости функционирования, характеризующейся совершенством способов "распознавания" защитой режима работы электрической системы, и надёжности функционирования, определяющейся в первую очередь отсутствием отказов устройств Р. з.
Один из простейших путей достижения селективности Р. з. (обычно токовых и дистанционных) — применение реле, в которых между моментом возникновения требования о срабатывании реле и завершением процесса срабатывания проходит строго определённый промежуток времени, называется выдержкой времени (см. Реле времени).
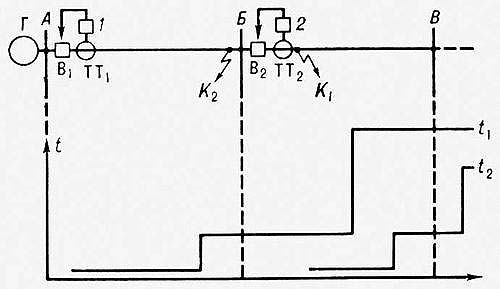
На рис. 1 показаны схема участка радиальной электрической сети с односторонним питанием (при котором ток к месту КЗ идёт с одной стороны), оснащенного относительно селективной Р. з., и соответствующие выдержки времени. Устройства Р. з. 1 и 2 имеют по три ступени, каждая из которых настроена на определённые значения входного сигнала т. о., что выдержка времени этих устройств ступенчато зависит от расстояния до места КЗ. Протяжённость зон, защищаемых отдельными ступенями, и соответствующие им выдержки времени выбираются с таким расчётом, чтобы устройства защиты поврежденных участков сети срабатывали раньше др. устройств. Зону первой ступени Р. з., не имеющей специального замедления срабатывания, приходится принимать несколько меньшей защищаемого участка, поскольку, например, устройство 1 не способно различить КЗ в точках K1 и K2. Последние ступени Р. з. (в Р. з., показанной на рис. 1, — третьи) — резервные, у них часто нет четко ограниченной зоны срабатывания.

В сетях, в которых ток к месту КЗ может идти с двух сторон (от разных источников питания или по обходной связи), относительно селективные Р. з. выполняют направленными — срабатывающими только тогда, когда мощность КЗ передаётся через защищаемые элементы в условном направлении от шин ближайшей подстанции в линию. Так, при КЗ в точке К (рис. 2) могут сработать только устройства 1, 3, 4 и 6. При этом устройства 1 и 3 (4 и 6) для обеспечения селективности согласованы между собой по зонам срабатывания и выдержкам времени.
В ряде случаев — на достаточно мощных генераторах, трансформаторах, линиях напряжением 110 кв и выше — для обеспечения высокого быстродействия Р. з. применяют сравнительно сложные абсолютно селективные защиты. Из них наиболее распространены т. н. продольные защиты, к которым для распознавания КЗ, в конце "своего" и в начале смежного участков подводится информация с разных концов элемента. Так, продольная дифференциальная токовая защита реагирует на геометрическую разность векторов токов на концах элемента. Эта разность при внешнем КЗ теоретически равна нулю, а при внутреннем — току в месте КЗ. В защитах др. типов производится сопоставление фаз векторов тока (дифференциально-фазная защита) или направлений потока мощности на концах элемента. К продольным защитам электрических машин и линий длиной примерно до 10 км информация об изменении электрических величин поступает непосредственно по соединительным проводам. На более длинных линиях для передачи такой информации обычно используют ВЧ каналы связи по проводам самой линии, а также УКВ каналы радиосвязи и радиорелейные линии.
Э. П. Смирнов.
[БСЭ, 1969-1978]НАЗНАЧЕНИЕ РЕЛЕЙНОЙ ЗАЩИТЫ
В энергетических системах могут возникать повреждения и ненормальные режимы работы электрооборудования электростанций и подстанций, их распределительных устройств, линий электропередачи и электроустановок потребителей электрической энергии.
Повреждения в большинстве случаев сопровождаются значительным увеличением тока и глубоким понижением напряжения в элементах энергосистемы.
Повышенный ток выделяет большое количество тепла, вызывающее разрушения в месте повреждения и опасный нагрев неповрежденных линий и оборудования, по которым этот ток проходит.
Понижение напряжения нарушает нормальную работу потребителей электроэнергии и устойчивость параллельной работы генераторов и энергосистемы в целом.
Ненормальные режимы обычно приводят к отклонению величин напряжения, тока и частоты от допустимых значений. При понижении частоты и напряжения создается опасность нарушения нормальной работы потребителей и устойчивости энергосистемы, а повышение напряжения и тока угрожает повреждением оборудования и линий электропередачи.
Таким образом, повреждения нарушают работу энергосистемы и потребителей электроэнергии, а ненормальные режимы создают возможность возникновения повреждений или расстройства работы энергосистемы.
Для обеспечения нормальной работы энергетической системы и потребителей электроэнергии необходимо возможно быстрее выявлять и отделять место повреждения от неповрежденной сети, восстанавливая таким путем нормальные условия их работы и прекращая разрушения в месте повреждения.
Опасные последствия ненормальных режимов также можно предотвратить, если своевременно обнаружить отклонение от нормального режима и принять меры к его устранению (например, снизить ток при его возрастании, понизить напряжение при его увеличении и т. д.).
В связи с этим возникает необходимость в создании и применении автоматических устройств, выполняющих указанные операции и защищающих систему и ее элементы от опасных последствий повреждений и ненормальных режимов.
Первоначально в качестве подобной защиты применялись плавкие предохранители. Однако по мере роста мощности и напряжения электрических установок и усложнения их схем коммутации такой способ защиты стал недостаточным, в силу чего были созданы защитные устройства, выполняемые при помощи специальных автоматов — реле, получившие название релейной защиты.
Релейная защита является основным видом электрической автоматики, без которой невозможна нормальная и надежная работа современных энергетических систем. Она осуществляет непрерывный контроль за состоянием и режимом работы всех элементов энергосистемы и реагирует на возникновение повреждений и ненормальных режимов.
При возникновении повреждений защита выявляет и отключает от системы поврежденный участок, воздействуя на специальные силовые выключатели, предназначенные для размыкания токов повреждения.
При возникновении ненормальных режимов защита выявляет их и в зависимости от характера нарушения производит операции, необходимые для восстановления нормального режима, или подает сигнал дежурному персоналу.
В современных электрических системах релейная защита тесно связана с электрической автоматикой, предназначенной для быстрого автоматического восстановления нормального режима и питания потребителей.
К основным устройствам такой автоматики относятся:- автоматы повторного включения (АПВ),
- автоматы включения резервных источников питания и оборудования (АВР),
- автоматы частотной разгрузки (АЧР).
[Чернобровов Н. В. Релейная защита. Учебное пособие для техникумов]
Тематики
Синонимы
EN
репарация
репаративный синтез
Восстанавление нативной первичной структуры молекулы ДНК (т.е. исправление повреждений, спонтанно возникающих в процессе репликации и рекомбинации или вызванных действием внешних факторов); различают фотореактивацию, эксцизионную и пострепликативную Р.; Р. осуществляется с помощью набора специфических репаративных ферментов; дефектность Р. ДНК наблюдается при некоторых НЗЧ - пигментной ксеродерме, атаксии-телангиэктазии, анемии Фанкони, трихотиодистрофии и др.
[Арефьев В.А., Лисовенко Л.А. Англо-русский толковый словарь генетических терминов 1995 407с.]Тематики
Синонимы
EN
степень защиты
Способ защиты, обеспечиваемый оболочкой от доступа к опасным частям, попадания внешних твердых предметов и (или) воды и проверяемый стандартными методами испытаний.
[ ГОСТ 14254-96( МЭК 529-89)]
степень защиты, обеспечиваемая оболочкой (IP)
Числовые обозначения после кода IP, которые в соответствии с МЭК 60529 [12] характеризуют оболочку электрооборудования, обеспечивающую:
- защиту персонала от прикасания или доступа к находящимся под напряжением или движущимся частям (за исключением гладких вращающихся валов и т.п.), расположенным внутри оболочки;
- защиту электрооборудования от проникания в него твердых посторонних тел и,
- если указано в обозначении, защиту электрооборудования от вредного проникания воды.
[ ГОСТ Р МЭК 60050-426-2006]EN
degree of protection of enclosure
IP (abbreviation)
numerical classification according to IEC 60529 preceded by the symbol IP applied to the enclosure of electrical apparatus to provide:
– protection of persons against contact with, or approach to, live parts and against contact with moving parts (other than smooth rotating shafts and the like) inside the enclosure,
– protection of the electrical apparatus against ingress of solid foreign objects, and
– where indicated by the classification, protection of the electrical apparatus against harmful ingress of water
[IEV number 426-04-02 ]FR
degré de protection procuré par une enveloppe
IP (abréviation)
classification numérique selon la CEI 60529, précédée du symbole IP, appliquée à une enveloppe de matériel électrique pour apporter:
– une protection des personnes contre tout contact ou proximité avec des parties actives et contre tout contact avec une pièce mobile (autre que les roulements en faible rotation) à l'intérieur d'une enveloppe
– une protection du matériel électrique contre la pénétration de corps solide étrangers, et
– selon l’indication donnée par la classification, une protection du matériel électrique contre la pénétration dangereuse de l’eau
[IEV number 426-04-02 ]Элементы кода IP и их обозначения по ГОСТ 14254-96( МЭК 529-89)
Цифры кода IP
Значение для защиты оборудования от проникновения внешних твердых предметов
Значение для защиты людей от доступа к опасным частям
Первая характеристическая цифра
0
Нет защиты
Нет защиты
1
диаметром ≥ 50 мм
тыльной стороной руки
2
диаметром ≥ 12,5 мм
пальцем
3
диаметром ≥ 2,5 мм
инструментом
4
диаметром ≥ 1,0 мм
проволокой
5
пылезащищенное
проволокой
6
пыленепроницаемое
проволокой
От вредного воздействия в результате проникновения воды
Вторая характеристическая цифра
0
Нет защиты
-
1
Вертикальное каплепадение
2
Каплепадение (номинальный угол 15°)
3
Дождевание
4
Сплошное обрызгивание
5
Действие струи
6
Сильное действие струи
7
Временное непродолжительное погружение
8
Длительное погружение
Дополнительная буква (при необходимости)
-
От доступа к опасным частям
A
тыльной стороной руки
B
пальцем
C
инструментом
проволокой
Вспомогательная буква (при необходимости)
Вспомогательная информация относящаяся к:
-
H
высоковольтным аппаратам
M
состоянию движения во время испытаний защиты от воды
S
состоянию неподвижности во время испытаний защиты от воды
W
Требования в части стойкости оболочек и электрооборудования в целом к климатическим, механическим внешним воздействующим факторам (ВВФ) и специальным средам (кроме проникновения внешних твердых предметов и воды) установлены вне рамок настоящего стандарта.
Параллельные тексты EN-RU
The code IP indicates the degrees of protection provided by an enclosure against access to hazardous parts, ingress of solid foreign objects and ingress of water.
The degree of protection of an enclosure is identified, in compliance with the specifications of the Standard IEC 60529, by the code letters IP (International Protection) followed by two numerals and two additional letters.
The first characteristic numeral indicates the degree of protection against ingress of solid foreign objects and against contact of persons with hazardous live parts inside the enclosure.
The second characteristic numeral indicates the degree of protection against ingress of water with harmful effects.
[ABB]Код IP обозначает степень защиты, обеспечиваемую оболочкой от попадания внутрь твердых посторонних предметов и воды.
Степень защиты оболочки обозначается в соответствии со стандартом МЭК 60529 буквенным обозначением IP (International Protection, т. е. Международная защита) после которого следуют две цифры, к которым в некоторых случаях добавляются еще две буквы.
Первая характеристическая цифра обозначает степень защиты от проникновения твердых посторонних предметов и от контакта людей с находящимися внутри оболочки опасными токоведущими частями.
Вторая характеристическая цифра обозначает степень защиты оболочки с точки зрения вредного воздействия, оказываемого проникновением воды.
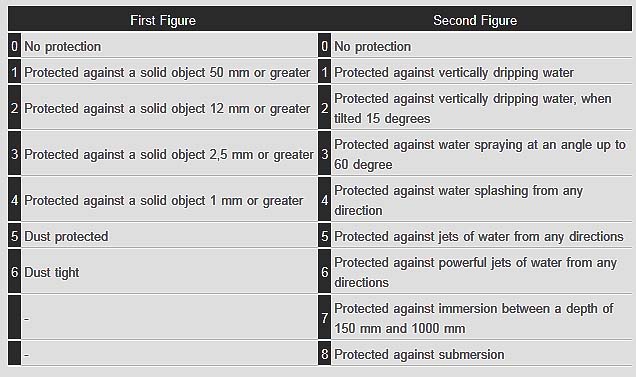
[Перевод Интент]The protection of enclosures against ingress of dirt or against the ingress of water is defined in IEC529 (BSEN60529:1991). Conversely, an enclosure which protects equipment against ingress of particles will also protect a person from potential hazards within that enclosure, and this degree of protection is also defined as a standard.
The degrees of protection are most commonly expressed as ‘IP’ followed by two numbers, e.g. IP65, where the numbers define the degree of protection. The first digit shows the extent to which the equipment is protected against particles, or to which persons are protected from enclosed hazards. The second digit indicates the extent of protection against water.
The wording in the table is not exactly as used in the standards document, but the dimensions are accurateIP Degree of Protection according to EN/IEC 60529
Correlations between IP (IEC) and NEMA 250 standards
IP10 -> NEMA 1
IP11 -> NEMA 2
IP54 -> NEMA 3 R
IP52 -> NEMA 5-12-12 K
IP54 -> NEMA 3-3 S
IP56 -> NEMA 4-4 X
IP67 -> NEMA 6-6 P[ http://electrical-engineering-portal.com/ip-protection-degree-iec-60529-explained]
Тематики
- безопасность машин и труда в целом
- электробезопасность
- электротехника, основные понятия
Действия
- степень защиты
- степень защиты, обеспечиваемая оболочкой
- степень защиты, обеспечиваемая оболочкой (код IP)
EN
- amount of protection
- degree of protection IP
- degree of protection of an enclosure
- degree of protection of enclosure
- degree of protection provided by enclosure
- enclosure rating
- ingress protection rating
- IP
- IP degree of protection,
- IP rating
- IP Sealing Specification
- IP security
- IPSec
- level of protection
- mechanical rating
- protection
- protection index
- protection rating
DE
- IP-Schutzgrad, m
- Schutzart des Gehäuses, f
FR
2.2.8 защита (protection): Предохранение поверхности объекта от возможных повреждений.
Англо-русский словарь нормативно-технической терминологии > protection
-
6 clock synchronization
синхронизация времени
-
[ ГОСТ Р МЭК 60870-5-103-2005]Также нормированы допустимые временные задержки для различных видов сигналов, включая дискретные сигналы, оцифрованные мгновенные значения токов и напряжений, сигналы синхронизации времени и т.п.
[Новости Электротехники №4(76) | СТАНДАРТ МЭК 61850]Широковещательное сообщение, как правило, содержит адрес отправителя и глобальный адрес получателя. Примером широковещательного сообщения служит синхронизация времени.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]Устройства последних поколений дают возможность синхронизации времени с точностью до микросекунд с помощью GPS.
С помощью этого интерфейса сигнал синхронизации времени (от радиоприемника DCF77 сигнал точного времени из Braunschweig, либо от радиоприемника iRiG-B сигнал точного времени глобальной спутниковой системы GPS) может быть передан в терминал для точной синхронизации времени.
[Герхард Циглер. ЦИФРОВАЯ ДИСТАНЦИОННАЯ ЗАЩИТА. ПРИНЦИПЫ И ПРИМЕНЕНИЕ
Перевод с английского ]В том случае если принятое сообщение искажено ( повреждено) в результате неисправности канала связи или в результате потери синхронизации времени, пользователь имеет возможность...
2.13 Синхронизация часов реального времени сигналом по оптовходу
В современных системах релейной защиты зачастую требуется синхронизированная работа часов всех реле в системе для восстановления хронологии работы разных реле.
Это может быть выполнено с использованием сигналов синхронизации времени по интерфейсу IRIG-B, если реле оснащено таким входом или сигналом от системы OP
[Дистанционная защита линии MiCOM P443/ ПРИНЦИП РАБОТЫ]
СИНХРОНИЗАЦИЯ ВРЕМЕНИ СОГЛАСНО СТАНДАРТУ IEEE 1588
Автор: Андреас Дреер (Hirschmann Automation and Control)
Вопрос синхронизации устройств по времени важен для многих распределенных систем промышленной автоматизации. При использовании протокола Precision Time Protocol (PTP), описанного стандартом IEEE 1588, становится возможным выполнение синхронизации внутренних часов устройств, объединенных по сети Ethernet, с погрешностями, не превышающими 1 микросекунду. При этом к вычислительной способности устройств и пропускной способности сети предъявляются относительно низкие требования. В 2008 году была утверждена вторая редакция стандарта (IEEE 1588-2008 – PTP версия 2) с рядом внесенных усовершенствований по сравнению с первой его редакцией.
ЗАЧЕМ НЕОБХОДИМА СИНХРОНИЗАЦИЯ УСТРОЙСТВ ПО ВРЕМЕНИ?
Во многих системах должен производиться отсчет времени. О неявной системе отсчета времени можно говорить тогда, когда в системе отсутствуют часы и ход времени определяется процессами, протекающими в аппаратном и программном обеспечении. Этого оказывается достаточно во многих случаях. Неявная система отсчета времени реализуется, к примеру, передачей сигналов, инициирующих начало отсчета времени и затем выполнение определенных действий, от одних устройств другим.
Система отсчета времени считается явной, если показания времени в ней определяются часами. Указанное необходимо для сложных систем. Таким образом, осуществляется разделение процедур передачи данных о времени и данных о процессе.
Два эффекта должны быть учтены при настройке или синхронизации часов в отдельных устройствах. Первое – показания часов в отдельных устройствах изначально отличаются друг от друга (смещение показаний времени друг относительно друга). Второе – реальные часы не производят отсчет времени с одинаковой скоростью. Таким образом, требуется проводить постоянную корректировку хода самых неточных часов.
Существуют различные способы синхронизации часов в составе отдельных устройств, объединенных в одну информационную сеть. Наиболее известные способы – это использование протокола NTP (Network Time Protocol), а также более простого протокола, который образован от него – протокола SNTP (Simple Network Time Protocol). Данные методы широко распространены для использования в локальных сетях и сети Интернет и позволяют обеспечивать синхронизацию времени с погрешностями в диапазоне миллисекунд. Другой вариант – использование радиосигналов с GPS спутников. Однако при использовании данного способа требуется наличие достаточно дорогих GPS-приемников для каждого из устройств, а также GPS-антенн. Данный способ теоретически может обеспечить высокую точность синхронизации времени, однако материальные затраты и трудозатраты обычно препятствуют реализации такого метода синхронизации.
Другим решением является передача высокоточного временного импульса (например, одного импульса в секунду) каждому отдельному устройству по выделенной линии. Реализация данного метода влечет за собой необходимость создания выделенной линии связи к каждому устройству.
Последним методом, который может быть использован, является протокол PTP (Precision Time Protocol), описанный стандартом IEEE 1588. Протокол был разработан со следующими целями:
- Обеспечение синхронизация времени с погрешностью, не превышающей 1 микросекунды.
-
Предъявление минимальных требований к производительности процессоров устройств и к пропускной способности линии связи, что позволило бы обеспечить реализацию протокола в простых и дешевых устройствах.
- Предъявление невысоких требований к обслуживающему персоналу.
- Возможность использования в сетях Ethernet, а также в других сетях.
- Спецификация его как международного стандарта.
ОБЛАСТИ ПРИМЕНЕНИЯ ПРОТОКОЛА PTP
Протокол PTP может быть применен в различного рода системах. В системах автоматизации, протокол PTP востребован везде, где требуется точная синхронизация устройств по времени. Протокол позволяет синхронизировать устройства в робототехнике или печатной промышленности, в системах осуществляющих обработку бумаги и упаковку продукции и других областях.
В общем и целом в любых системах, где осуществляется измерение тех или иных величин и их сравнение с величинами, измеренными другими устройствами, использование протокола PTP является популярным решением. Системы управления турбинами используют протокол PTP для обеспечения более эффективной работы станций. События, происходящие в различных частях распределенных в пространстве систем, определяются метками точного времени и затем для целей архивирования и анализа осуществляется их передача на центры управления. Геоученые используют протокол PTP для синхронизации установок мониторинга сейсмической активности, удаленных друг от друга на значительные расстояния, что предоставляет возможность более точным образом определять эпицентры землетрясений. В области телекоммуникаций рассматривают возможность использования протокола PTP для целей синхронизации сетей и базовых станций. Также синхронизация времени согласно стандарту IEEE 1588 представляет интерес для разработчиков систем обеспечения жизнедеятельности, систем передачи аудио и видео потоков и может быть использована в военной промышленности.
В электроэнергетике протокол PTPv2 (протокол PTP версии 2) определен для синхронизации интеллектуальных электронных устройств (IED) по времени. Например, при реализации шины процесса, с передачей мгновенных значений тока и напряжения согласно стандарту МЭК 61850-9-2, требуется точная синхронизация полевых устройств по времени. Для реализации систем защиты и автоматики с использованием сети Ethernet погрешность синхронизации данных различных устройств по времени должна лежать в микросекундном диапазоне.
Также для реализации функций синхронизированного распределенного векторного измерения электрических величин согласно стандарту IEEE C37.118, учета, оценки качества электрической энергии или анализа аварийных событий необходимо наличие устройств, синхронизированных по времени с максимальной точностью, для чего может быть использован протокол PTP.
Вторая редакция стандарта МЭК 61850 определяет использование в системах синхронизации времени протокола PTP. Детализация профиля протокола PTP для использования на объектах электроэнергетики (IEEE Standard Profile for Use of IEEE 1588 Precision Time Protocol in Power System Applications) в настоящее время осуществляется рабочей группой комитета по релейной защите и автоматике организации (PSRC) IEEE.
В 2005 году была начата работа по изменению стандарта IEEE1588-2002 с целью расширения возможных областей его применения (телекоммуникации, беспроводная связь и в др.). Результатом работы стало новое издание IEEE1588-2008, которое доступно с марта 2008 со следующими новыми особенностями:
- Усовершенствованные алгоритмы для обеспечения погрешностей в наносекундном диапазоне.
- Повышенное быстродействие синхронизации времени (возможна более частая передача сообщений синхронизации Sync).
- Поддержка новых типов сообщений.
- Ввод однорежимного принципа работы (не требуется передачи сообщений типа FollowUp).
- Ввод поддержки функции т.н. прозрачных часов для предотвращения накопления погрешностей измерения при каскадной схеме соединения коммутаторов.
- Ввод профилей, определяющих настройки для новых областей применения.
- Возможность назначения на такие транспортные механизмы как DeviceNet, PROFInet и IEEE802.3/Ethernet (прямое назначение).
- Ввод структуры TLV (тип, длина, значение) для расширения возможных областей применения стандарта и удовлетворения будущих потребностей.
- Ввод дополнительных опциональных расширений стандарта.
ПРИНЦИП ФУНКЦИОНИРОВАНИЯ СИСТЕМ НА ОСНОВЕ ПРОТОКОЛА PTP
В системах, где используется протокол PTP, различают два вида часов: ведущие часы и ведомые часы. Ведущие часы, в идеале, контролируются либо радиочасами, либо GPS-приемниками и осуществляют синхронизацию ведомых часов. Часы в конечном устройстве, неважно ведущие ли они или ведомые, считаются обычными часами; часы в составе устройств сети, выполняющих функцию передачи и маршрутизации данных (например, в Ethernet-коммутаторах), считаются граничными часами.
Процедура синхронизации согласно протоколу PTP подразделяется на два этапа. На первом этапе осуществляется коррекция разницы показаний времени между ведущими и ведомыми часами – то есть осуществляется так называемая коррекция смещения показаний времени. Для этого ведущее устройство осуществляет передачу сообщения для целей синхронизации времени Sync ведомому устройству (сообщение типа Sync). Сообщение содержит в себе текущее показание времени ведущих часов и его передача осуществляется периодически через фиксированные интервалы времени. Однако поскольку считывание показаний ведущих часов, обработка данных и передача через контроллер Ethernet занимает некоторое время, информация в передаваемом сообщении к моменту его приема оказывается неактуальной. Одновременно с этим осуществляется как можно более точная фиксация момента времени, в который сообщение Sync уходит от отправителя, в составе которого находятся ведущие часы (TM1). Затем ведущее устройство осуществляет передачу зафиксированного момента времени передачи сообщения Sync ведомым устройствам (сообщение FollowUp). Те также как можно точнее осуществляют измерение момента времени приема первого сообщения (TS1) и вычисляют величину, на которую необходимо выполнить коррекцию разницы в показаниях времени между собою и ведущим устройством соответственно (O) (см. рис. 1 и рис. 2). Затем непосредственно осуществляется коррекция показаний часов в составе ведомых устройств на величину смещения. Если задержки в передачи сообщений по сети не было, то можно утверждать, что устройства синхронизированы по времени.
На втором этапе процедуры синхронизации устройств по времени осуществляется определение задержки в передаче упомянутых выше сообщений по сети между устройствами. Указанное выполняется при использовании сообщений специального типа. Ведомое устройство отправляет так называемое сообщение Delay Request (Запрос задержки в передаче сообщения по сети) ведущему устройству и осуществляет фиксацию момента передачи данного сообщения. Ведущее устройство фиксирует момент приема данного сообщения и отправляет зафиксированное значение в сообщении Delay Response (Ответное сообщение с указанием момента приема сообщения). Исходя из зафиксированных времен передачи сообщения Delay Request ведомым устройством и приема сообщения Delay Response ведущим устройством производится оценка задержки в передачи сообщения между ними по сети. Затем производится соответствующая коррекция показаний часов в ведомом устройстве. Однако все упомянутое выше справедливо, если характерна симметричная задержка в передаче сообщения в обоих направлениях между устройствами (то есть характерны одинаковые значения в задержке передачи сообщений в обоих направлениях).
Задержка в передачи сообщения в обоих направлениях будет идентичной в том случае, если устройства соединены между собой по одной линии связи и только. Если в сети между устройствами имеются коммутаторы или маршрутизаторы, то симметричной задержка в передачи сообщения между устройствами не будет, поскольку коммутаторы в сети осуществляют сохранение тех пакетов данных, которые проходят через них, и реализуется определенная очередность их передачи. Эта особенность может, в некоторых случаях, значительным образом влиять на величину задержки в передаче сообщений (возможны значительные отличия во временах передачи данных). При низкой информационной загрузке сети этот эффект оказывает малое влияние, однако при высокой информационной загрузке, указанное может значительным образом повлиять на точность синхронизации времени. Для исключения больших погрешностей был предложен специальный метод и введено понятие граничных часов, которые реализуются в составе коммутаторов сети. Данные граничные часы синхронизируются по времени с часами ведущего устройства. Далее коммутатор по каждому порту является ведущим устройством для всех ведомых устройств, подключенных к его портам, в которых осуществляется соответствующая синхронизация часов. Таким образом, синхронизация всегда осуществляется по схеме точка-точка и характерна практически одинаковая задержка в передаче сообщения в прямом и обратном направлении, а также практическая неизменность этой задержки по величине от одной передачи сообщения к другой.
Хотя принцип, основанный на использовании граничных часов показал свою практическую эффективность, другой механизм был определен во второй версии протокола PTPv2 – механизм использования т. н. прозрачных часов. Данный механизм предотвращает накопление погрешности, обусловленной изменением величины задержек в передаче сообщений синхронизации коммутаторами и предотвращает снижение точности синхронизации в случае наличия сети с большим числом каскадно-соединенных коммутаторов. При использовании такого механизма передача сообщений синхронизации осуществляется от ведущего устройства ведомому, как и передача любого другого сообщения в сети. Однако когда сообщение синхронизации проходит через коммутатор фиксируется задержка его передачи коммутатором. Задержка фиксируется в специальном поле коррекции в составе первого сообщения синхронизации Sync или в составе последующего сообщения FollowUp (см. рис. 2). При передаче сообщений Delay Request и Delay Response также осуществляется фиксация времени задержки их в коммутаторе. Таким образом, реализация поддержки т. н. прозрачных часов в составе коммутаторов позволяет компенсировать задержки, возникающие непосредственно в них.
Если необходимо использование протокола PTP в системе, должен быть реализован стек протокола PTP. Это может быть сделано при предъявлении минимальных требований к производительности процессоров устройств и к пропускной способности сети. Это очень важно для реализации стека протокола в простых и дешевых устройствах. Протокол PTP может быть без труда реализован даже в системах, построенных на дешевых контроллерах (32 бита).
Единственное требование, которое необходимо удовлетворить для обеспечения высокой точности синхронизации, – как можно более точное измерение устройствами момента времени, в который осуществляется передача сообщения, и момента времени, когда осуществляется прием сообщения. Измерение должно производится максимально близко к аппаратной части (например, непосредственно в драйвере) и с максимально возможной точностью. В реализациях исключительно на программном уровне архитектура и производительность системы непосредственно ограничивают максимально допустимую точность.
При использовании дополнительной поддержки аппаратного обеспечения для присвоения меток времени, точность может быть значительным образом повышена и может быть обеспечена ее виртуальная независимость от программного обеспечения. Для этого необходимо использование дополнительной логики, которая может быть реализована в программируемой логической интегральной схеме или специализированной для решения конкретной задачи интегральной схеме на сетевом входе.
Компания Hirschmann – один из первых производителей, реализовавших протокол PTP и оптимизировавших его использование. Компанией был разработан стек, максимально эффективно реализующий протокол, а также чип (программируемая интегральная логическая схема), который обеспечивает высокую точность проводимых замеров.
В системе, в которой несколько обычных часов объединены через Ethernet-коммутатор с функцией граничных часов, была достигнута предельная погрешность +/- 60 нс при практически полной независимости от загрузки сети и загрузки процессора. Также компанией была протестирована система, состоящая из 30 каскадно-соединенных коммутаторов, обладающих функцией поддержки т.н. прозрачных часов и были зафиксированы погрешности менее в пределах +/- 200 нс.
Компания Hirschmann Automation and Control реализовала протоколы PTP версии 1 и версии 2 в промышленных коммутаторах серии MICE, а также в серии монтируемых на стойку коммутаторов MACH100.
Протокол PTP во многих областях уже доказал эффективность своего применения. Можно быть уверенным, что он получит более широкое распространение в течение следующих лет и что многие решения при его использовании смогут быть реализованы более просто и эффективно чем при использовании других технологий.
[ Источник]
Тематики
- релейная защита
- телемеханика, телеметрия
EN
синхронизация по тактам
тактовая синхронизация
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
Синонимы
EN
Англо-русский словарь нормативно-технической терминологии > clock synchronization
-
7 time synchronization
синхронизация времени
-
[ ГОСТ Р МЭК 60870-5-103-2005]Также нормированы допустимые временные задержки для различных видов сигналов, включая дискретные сигналы, оцифрованные мгновенные значения токов и напряжений, сигналы синхронизации времени и т.п.
[Новости Электротехники №4(76) | СТАНДАРТ МЭК 61850]Широковещательное сообщение, как правило, содержит адрес отправителя и глобальный адрес получателя. Примером широковещательного сообщения служит синхронизация времени.
[ ГОСТ Р 54325-2011 (IEC/TS 61850-2:2003)]Устройства последних поколений дают возможность синхронизации времени с точностью до микросекунд с помощью GPS.
С помощью этого интерфейса сигнал синхронизации времени (от радиоприемника DCF77 сигнал точного времени из Braunschweig, либо от радиоприемника iRiG-B сигнал точного времени глобальной спутниковой системы GPS) может быть передан в терминал для точной синхронизации времени.
[Герхард Циглер. ЦИФРОВАЯ ДИСТАНЦИОННАЯ ЗАЩИТА. ПРИНЦИПЫ И ПРИМЕНЕНИЕ
Перевод с английского ]В том случае если принятое сообщение искажено ( повреждено) в результате неисправности канала связи или в результате потери синхронизации времени, пользователь имеет возможность...
2.13 Синхронизация часов реального времени сигналом по оптовходу
В современных системах релейной защиты зачастую требуется синхронизированная работа часов всех реле в системе для восстановления хронологии работы разных реле.
Это может быть выполнено с использованием сигналов синхронизации времени по интерфейсу IRIG-B, если реле оснащено таким входом или сигналом от системы OP
[Дистанционная защита линии MiCOM P443/ ПРИНЦИП РАБОТЫ]
СИНХРОНИЗАЦИЯ ВРЕМЕНИ СОГЛАСНО СТАНДАРТУ IEEE 1588
Автор: Андреас Дреер (Hirschmann Automation and Control)
Вопрос синхронизации устройств по времени важен для многих распределенных систем промышленной автоматизации. При использовании протокола Precision Time Protocol (PTP), описанного стандартом IEEE 1588, становится возможным выполнение синхронизации внутренних часов устройств, объединенных по сети Ethernet, с погрешностями, не превышающими 1 микросекунду. При этом к вычислительной способности устройств и пропускной способности сети предъявляются относительно низкие требования. В 2008 году была утверждена вторая редакция стандарта (IEEE 1588-2008 – PTP версия 2) с рядом внесенных усовершенствований по сравнению с первой его редакцией.
ЗАЧЕМ НЕОБХОДИМА СИНХРОНИЗАЦИЯ УСТРОЙСТВ ПО ВРЕМЕНИ?
Во многих системах должен производиться отсчет времени. О неявной системе отсчета времени можно говорить тогда, когда в системе отсутствуют часы и ход времени определяется процессами, протекающими в аппаратном и программном обеспечении. Этого оказывается достаточно во многих случаях. Неявная система отсчета времени реализуется, к примеру, передачей сигналов, инициирующих начало отсчета времени и затем выполнение определенных действий, от одних устройств другим.
Система отсчета времени считается явной, если показания времени в ней определяются часами. Указанное необходимо для сложных систем. Таким образом, осуществляется разделение процедур передачи данных о времени и данных о процессе.
Два эффекта должны быть учтены при настройке или синхронизации часов в отдельных устройствах. Первое – показания часов в отдельных устройствах изначально отличаются друг от друга (смещение показаний времени друг относительно друга). Второе – реальные часы не производят отсчет времени с одинаковой скоростью. Таким образом, требуется проводить постоянную корректировку хода самых неточных часов.
Существуют различные способы синхронизации часов в составе отдельных устройств, объединенных в одну информационную сеть. Наиболее известные способы – это использование протокола NTP (Network Time Protocol), а также более простого протокола, который образован от него – протокола SNTP (Simple Network Time Protocol). Данные методы широко распространены для использования в локальных сетях и сети Интернет и позволяют обеспечивать синхронизацию времени с погрешностями в диапазоне миллисекунд. Другой вариант – использование радиосигналов с GPS спутников. Однако при использовании данного способа требуется наличие достаточно дорогих GPS-приемников для каждого из устройств, а также GPS-антенн. Данный способ теоретически может обеспечить высокую точность синхронизации времени, однако материальные затраты и трудозатраты обычно препятствуют реализации такого метода синхронизации.
Другим решением является передача высокоточного временного импульса (например, одного импульса в секунду) каждому отдельному устройству по выделенной линии. Реализация данного метода влечет за собой необходимость создания выделенной линии связи к каждому устройству.
Последним методом, который может быть использован, является протокол PTP (Precision Time Protocol), описанный стандартом IEEE 1588. Протокол был разработан со следующими целями:
- Обеспечение синхронизация времени с погрешностью, не превышающей 1 микросекунды.
-
Предъявление минимальных требований к производительности процессоров устройств и к пропускной способности линии связи, что позволило бы обеспечить реализацию протокола в простых и дешевых устройствах.
- Предъявление невысоких требований к обслуживающему персоналу.
- Возможность использования в сетях Ethernet, а также в других сетях.
- Спецификация его как международного стандарта.
ОБЛАСТИ ПРИМЕНЕНИЯ ПРОТОКОЛА PTP
Протокол PTP может быть применен в различного рода системах. В системах автоматизации, протокол PTP востребован везде, где требуется точная синхронизация устройств по времени. Протокол позволяет синхронизировать устройства в робототехнике или печатной промышленности, в системах осуществляющих обработку бумаги и упаковку продукции и других областях.
В общем и целом в любых системах, где осуществляется измерение тех или иных величин и их сравнение с величинами, измеренными другими устройствами, использование протокола PTP является популярным решением. Системы управления турбинами используют протокол PTP для обеспечения более эффективной работы станций. События, происходящие в различных частях распределенных в пространстве систем, определяются метками точного времени и затем для целей архивирования и анализа осуществляется их передача на центры управления. Геоученые используют протокол PTP для синхронизации установок мониторинга сейсмической активности, удаленных друг от друга на значительные расстояния, что предоставляет возможность более точным образом определять эпицентры землетрясений. В области телекоммуникаций рассматривают возможность использования протокола PTP для целей синхронизации сетей и базовых станций. Также синхронизация времени согласно стандарту IEEE 1588 представляет интерес для разработчиков систем обеспечения жизнедеятельности, систем передачи аудио и видео потоков и может быть использована в военной промышленности.
В электроэнергетике протокол PTPv2 (протокол PTP версии 2) определен для синхронизации интеллектуальных электронных устройств (IED) по времени. Например, при реализации шины процесса, с передачей мгновенных значений тока и напряжения согласно стандарту МЭК 61850-9-2, требуется точная синхронизация полевых устройств по времени. Для реализации систем защиты и автоматики с использованием сети Ethernet погрешность синхронизации данных различных устройств по времени должна лежать в микросекундном диапазоне.
Также для реализации функций синхронизированного распределенного векторного измерения электрических величин согласно стандарту IEEE C37.118, учета, оценки качества электрической энергии или анализа аварийных событий необходимо наличие устройств, синхронизированных по времени с максимальной точностью, для чего может быть использован протокол PTP.
Вторая редакция стандарта МЭК 61850 определяет использование в системах синхронизации времени протокола PTP. Детализация профиля протокола PTP для использования на объектах электроэнергетики (IEEE Standard Profile for Use of IEEE 1588 Precision Time Protocol in Power System Applications) в настоящее время осуществляется рабочей группой комитета по релейной защите и автоматике организации (PSRC) IEEE.
В 2005 году была начата работа по изменению стандарта IEEE1588-2002 с целью расширения возможных областей его применения (телекоммуникации, беспроводная связь и в др.). Результатом работы стало новое издание IEEE1588-2008, которое доступно с марта 2008 со следующими новыми особенностями:
- Усовершенствованные алгоритмы для обеспечения погрешностей в наносекундном диапазоне.
- Повышенное быстродействие синхронизации времени (возможна более частая передача сообщений синхронизации Sync).
- Поддержка новых типов сообщений.
- Ввод однорежимного принципа работы (не требуется передачи сообщений типа FollowUp).
- Ввод поддержки функции т.н. прозрачных часов для предотвращения накопления погрешностей измерения при каскадной схеме соединения коммутаторов.
- Ввод профилей, определяющих настройки для новых областей применения.
- Возможность назначения на такие транспортные механизмы как DeviceNet, PROFInet и IEEE802.3/Ethernet (прямое назначение).
- Ввод структуры TLV (тип, длина, значение) для расширения возможных областей применения стандарта и удовлетворения будущих потребностей.
- Ввод дополнительных опциональных расширений стандарта.
ПРИНЦИП ФУНКЦИОНИРОВАНИЯ СИСТЕМ НА ОСНОВЕ ПРОТОКОЛА PTP
В системах, где используется протокол PTP, различают два вида часов: ведущие часы и ведомые часы. Ведущие часы, в идеале, контролируются либо радиочасами, либо GPS-приемниками и осуществляют синхронизацию ведомых часов. Часы в конечном устройстве, неважно ведущие ли они или ведомые, считаются обычными часами; часы в составе устройств сети, выполняющих функцию передачи и маршрутизации данных (например, в Ethernet-коммутаторах), считаются граничными часами.
Процедура синхронизации согласно протоколу PTP подразделяется на два этапа. На первом этапе осуществляется коррекция разницы показаний времени между ведущими и ведомыми часами – то есть осуществляется так называемая коррекция смещения показаний времени. Для этого ведущее устройство осуществляет передачу сообщения для целей синхронизации времени Sync ведомому устройству (сообщение типа Sync). Сообщение содержит в себе текущее показание времени ведущих часов и его передача осуществляется периодически через фиксированные интервалы времени. Однако поскольку считывание показаний ведущих часов, обработка данных и передача через контроллер Ethernet занимает некоторое время, информация в передаваемом сообщении к моменту его приема оказывается неактуальной. Одновременно с этим осуществляется как можно более точная фиксация момента времени, в который сообщение Sync уходит от отправителя, в составе которого находятся ведущие часы (TM1). Затем ведущее устройство осуществляет передачу зафиксированного момента времени передачи сообщения Sync ведомым устройствам (сообщение FollowUp). Те также как можно точнее осуществляют измерение момента времени приема первого сообщения (TS1) и вычисляют величину, на которую необходимо выполнить коррекцию разницы в показаниях времени между собою и ведущим устройством соответственно (O) (см. рис. 1 и рис. 2). Затем непосредственно осуществляется коррекция показаний часов в составе ведомых устройств на величину смещения. Если задержки в передачи сообщений по сети не было, то можно утверждать, что устройства синхронизированы по времени.
На втором этапе процедуры синхронизации устройств по времени осуществляется определение задержки в передаче упомянутых выше сообщений по сети между устройствами. Указанное выполняется при использовании сообщений специального типа. Ведомое устройство отправляет так называемое сообщение Delay Request (Запрос задержки в передаче сообщения по сети) ведущему устройству и осуществляет фиксацию момента передачи данного сообщения. Ведущее устройство фиксирует момент приема данного сообщения и отправляет зафиксированное значение в сообщении Delay Response (Ответное сообщение с указанием момента приема сообщения). Исходя из зафиксированных времен передачи сообщения Delay Request ведомым устройством и приема сообщения Delay Response ведущим устройством производится оценка задержки в передачи сообщения между ними по сети. Затем производится соответствующая коррекция показаний часов в ведомом устройстве. Однако все упомянутое выше справедливо, если характерна симметричная задержка в передаче сообщения в обоих направлениях между устройствами (то есть характерны одинаковые значения в задержке передачи сообщений в обоих направлениях).
Задержка в передачи сообщения в обоих направлениях будет идентичной в том случае, если устройства соединены между собой по одной линии связи и только. Если в сети между устройствами имеются коммутаторы или маршрутизаторы, то симметричной задержка в передачи сообщения между устройствами не будет, поскольку коммутаторы в сети осуществляют сохранение тех пакетов данных, которые проходят через них, и реализуется определенная очередность их передачи. Эта особенность может, в некоторых случаях, значительным образом влиять на величину задержки в передаче сообщений (возможны значительные отличия во временах передачи данных). При низкой информационной загрузке сети этот эффект оказывает малое влияние, однако при высокой информационной загрузке, указанное может значительным образом повлиять на точность синхронизации времени. Для исключения больших погрешностей был предложен специальный метод и введено понятие граничных часов, которые реализуются в составе коммутаторов сети. Данные граничные часы синхронизируются по времени с часами ведущего устройства. Далее коммутатор по каждому порту является ведущим устройством для всех ведомых устройств, подключенных к его портам, в которых осуществляется соответствующая синхронизация часов. Таким образом, синхронизация всегда осуществляется по схеме точка-точка и характерна практически одинаковая задержка в передаче сообщения в прямом и обратном направлении, а также практическая неизменность этой задержки по величине от одной передачи сообщения к другой.
Хотя принцип, основанный на использовании граничных часов показал свою практическую эффективность, другой механизм был определен во второй версии протокола PTPv2 – механизм использования т. н. прозрачных часов. Данный механизм предотвращает накопление погрешности, обусловленной изменением величины задержек в передаче сообщений синхронизации коммутаторами и предотвращает снижение точности синхронизации в случае наличия сети с большим числом каскадно-соединенных коммутаторов. При использовании такого механизма передача сообщений синхронизации осуществляется от ведущего устройства ведомому, как и передача любого другого сообщения в сети. Однако когда сообщение синхронизации проходит через коммутатор фиксируется задержка его передачи коммутатором. Задержка фиксируется в специальном поле коррекции в составе первого сообщения синхронизации Sync или в составе последующего сообщения FollowUp (см. рис. 2). При передаче сообщений Delay Request и Delay Response также осуществляется фиксация времени задержки их в коммутаторе. Таким образом, реализация поддержки т. н. прозрачных часов в составе коммутаторов позволяет компенсировать задержки, возникающие непосредственно в них.
Если необходимо использование протокола PTP в системе, должен быть реализован стек протокола PTP. Это может быть сделано при предъявлении минимальных требований к производительности процессоров устройств и к пропускной способности сети. Это очень важно для реализации стека протокола в простых и дешевых устройствах. Протокол PTP может быть без труда реализован даже в системах, построенных на дешевых контроллерах (32 бита).
Единственное требование, которое необходимо удовлетворить для обеспечения высокой точности синхронизации, – как можно более точное измерение устройствами момента времени, в который осуществляется передача сообщения, и момента времени, когда осуществляется прием сообщения. Измерение должно производится максимально близко к аппаратной части (например, непосредственно в драйвере) и с максимально возможной точностью. В реализациях исключительно на программном уровне архитектура и производительность системы непосредственно ограничивают максимально допустимую точность.
При использовании дополнительной поддержки аппаратного обеспечения для присвоения меток времени, точность может быть значительным образом повышена и может быть обеспечена ее виртуальная независимость от программного обеспечения. Для этого необходимо использование дополнительной логики, которая может быть реализована в программируемой логической интегральной схеме или специализированной для решения конкретной задачи интегральной схеме на сетевом входе.
Компания Hirschmann – один из первых производителей, реализовавших протокол PTP и оптимизировавших его использование. Компанией был разработан стек, максимально эффективно реализующий протокол, а также чип (программируемая интегральная логическая схема), который обеспечивает высокую точность проводимых замеров.
В системе, в которой несколько обычных часов объединены через Ethernet-коммутатор с функцией граничных часов, была достигнута предельная погрешность +/- 60 нс при практически полной независимости от загрузки сети и загрузки процессора. Также компанией была протестирована система, состоящая из 30 каскадно-соединенных коммутаторов, обладающих функцией поддержки т.н. прозрачных часов и были зафиксированы погрешности менее в пределах +/- 200 нс.
Компания Hirschmann Automation and Control реализовала протоколы PTP версии 1 и версии 2 в промышленных коммутаторах серии MICE, а также в серии монтируемых на стойку коммутаторов MACH100.
Протокол PTP во многих областях уже доказал эффективность своего применения. Можно быть уверенным, что он получит более широкое распространение в течение следующих лет и что многие решения при его использовании смогут быть реализованы более просто и эффективно чем при использовании других технологий.
[ Источник]
Тематики
- релейная защита
- телемеханика, телеметрия
EN
Англо-русский словарь нормативно-технической терминологии > time synchronization
-
8 DP
- процессор для обработки данных
- проект предложения
- приоритет при отбрасывании
- предварительное сообщение
- порт пункта назначения
- перепад давлений
- обработка данных
- импульс набора номера
- дистанционная защита
- динамическое программирование
- выявленный загрязнитель воздуха, не имеющий установленных норм по предельно-допустимой концентрации
выявленный загрязнитель воздуха, не имеющий установленных норм по предельно-допустимой концентрации
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
динамическое программирование
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]
динамическое программирование
Раздел математического программирования, совокупность приемов, позволяющих находить оптимальные решения, основанные на вычислении последствий каждого решения и выработке оптимальной стратегии для последующих решений. Процессы принятия решений, которые строятся по такому принципу, называются многошаговыми процессами. Математически оптимизационная задача строится в Д. п. с помощью таких соотношений, которые последовательно связаны между собой: например, полученный результат для одного года вводится в уравнение для следующего (или, наоборот, для предыдущего), и т.д. Таким образом, можно получить на вычислительной машине результаты решения задачи для любого избранного момента времени и «следовать» дальше. Д.п. применяется не обязательно для задач, связанных с течением времени. Многошаговым может быть и процесс решения вполне «статической» задачи. Таковы, например, некоторые задачи распределения ресурсов. Общим для задач Д.п. является то, что переменные в модели рассматриваются не вместе, а последовательно, одна за другой. Иными словами, строится такая вычислительная схема, когда вместо одной задачи со многими переменными строится много задач с малым числом (обычно даже одной) переменных в каждой. Это значительно сокращает объем вычислений. Однако такое преимущество достигается лишь при двух условиях: когда критерий оптимальности аддитивен, т.е. общее оптимальное решение является суммой оптимальных решений каждого шага, и когда будущие результаты не зависят от предыстории того состояния системы, при котором принимается решение. Все это вытекает из принципа оптимальности Беллмана (см. Беллмана принцип оптимальности), лежащего в основе теории Д.п. Из него же вытекает основной прием — нахождение правил доминирования, на основе которых на каждом шаге производится сравнение вариантов будущего развития и заблаговременное отсеивание заведомо бесперспективных вариантов. Когда эти правила обращаются в формулы, однозначно определяющие элементы последовательности один за другим, их называют разрешающими правилами. Процесс решения при этом складывается из двух этапов. На первом он ведется «с конца»: для каждого из различных предположений о том, чем кончился предпоследний шаг, находится условное оптимальное управление на последнем шаге, т.е. управление, которое надо применить, если предпоследний шаг закончился определенным образом. Такая процедура проводится до самого начала, а затем — второй раз — выполняется от начала к концу, в результате чего находятся уже не условные, а действительно оптимальные шаговые управления на всех шагах операции (см. пример в статье Дерево решений). Несмотря на выигрыш в сокращении вычислений при использовании подобных методов по сравнению с простым перебором возможных вариантов, их объем остается очень большим. Поэтому размерность практических задач Д.п. всегда незначительна, что ограничивает его применение. Можно выделить два наиболее общих класса задач, к которым в принципе мог бы быть применим этот метод, если бы не «проклятие размерности». (На самом деле на таких задачах, взятых в крайне упрощенном виде, пока удается лишь демонстрировать общие основы метода и анализировать экономико-математические модели). Первый — задачи планирования деятельности экономического объекта (предприятия, отрасли и т.п.) с учетом изменения потребности в производимой продукции во времени. Второй класс задач — оптимальное распределение ресурсов между различными направлениями во времени. Сюда можно отнести, в частности, такую интересную задачу: как распределить урожай зерна каждого года на питание и на семена, чтобы в сумме за ряд лет получить наибольшее количество хлеба?
[ http://slovar-lopatnikov.ru/]Тематики
EN
дистанционная защита
-
[В.А.Семенов Англо-русский словарь по релейной защите]
дистанционная защита
Защита с относительной селективностью, срабатывание и селективность которой зависят от измерения в месте ее установки электрических величин, по которым путем сравнения с уставками зон оценивается эквивалентная удаленность повреждения
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
дистанционная защита
Защита, чье действие и селективность основаны на локальном измерении электрических величин, по которым рассчитываются эквивалентные расстояния до места повреждения в пределах установленных зон.
[ http://docs.cntd.ru/document/1200069370]
дистанционная защита
Защита, принцип действия и селективность которой основаны на измерении в месте установки защиты электрических величин, характеризующих повреждение, и сравнении их с уставками зон.
[Циглер Г. Цифровая дистанционная защита: принципы и применение. М.: Энергоиздат. 2005]EN
distance protection
distance relay (US)
a non-unit protection whose operation and selectivity depend on local measurement of electrical quantities from which the equivalent distance to the fault is evaluated by comparing with zone settings
[IEV ref 448-14-01]FR
protection de distance
protection à sélectivité relative de section dont le fonctionnement et la sélectivité dépendent de la mesure locale de grandeurs électriques à partir desquelles la distance équivalente du défaut est évaluée par comparaison avec des réglages de zones
[IEV ref 448-14-01]Дистанционные защиты применяются в сетях сложной конфигурации, где по соображениям быстродействия и чувствительности не могут использоваться более простые максимальные токовые и токовые направленные защиты.
Дистанционной защитой определяется сопротивление (или расстояние - дистанция) до места КЗ, и в зависимости от этого защита срабатывает с меньшей или большей выдержкой времени. Следует уточнить, что современные дистанционные защиты, обладающие ступенчатыми характеристиками времени, не измеряют каждый раз при КЗ значение указанного выше сопротивления на зажимах измерительного органа и не устанавливают в зависимости от этого большую или меньшую выдержку времени, а всего лишь контролируют зону, в которой произошло повреждение. Время срабатывания защиты при КЗ в любой точке рассматриваемой зоны остается неизменным. Каждая защита выполняется многоступенчатой, причем при КЗ в первой зоне, охватывающей 80-85% длины защищаемой линии, время срабатывания защиты не более 0,15 с. Для второй зоны, выходящей за пределы защищаемой линии, выдержка времени на ступень выше и колеблется в пределах 0,4-0,6 с. При КЗ в третьей зоне выдержка времени еще более увеличивается и выбирается так же, как и для направленных токовых защит.
На рис. 7.15 показан участок сети с двухсторонним питанием и приведены согласованные характеристики выдержек времени дистанционных защит (ДЗ). При КЗ, например, в точке К1 - первой зоне действия защит ДЗ3 и ДЗ4 - они сработают с минимальным временем соответственно t I3 и t I4. Защиты ДЗ1 и ДЗ6 также придут в действие, но для них повреждение будет находиться в III зоне, и они могут сработать как резервные с временем t III1 и t III6 только в случае отказа в отключении линии БВ собственными защитами.
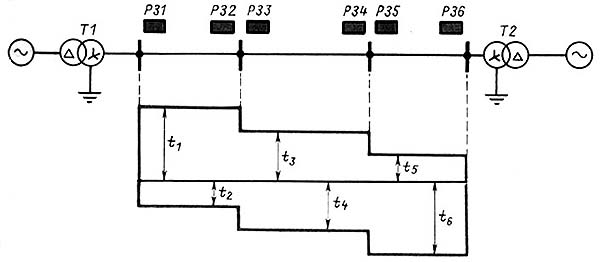
Рис. 7.14. Размещение токовых направленных защит нулевой последовательности на участке сетей и характеристики выдержек времени защит:
Р31-Р36 - комплекты токовых направленных защит нулевой последовательности
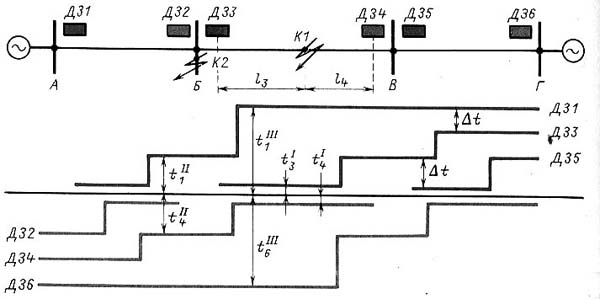
Рис. 7.15. Защита участка сети дистанционными защитами и характеристики выдержек времени этих защит:
ДЗ1-ДЗ6 - комплекты дистанционных защит; l3 и l4 - расстояния от мест установки защит до места повреждения
При КЗ в точке К2 (шины Б) оно устраняется действием защит ДЗ1 и ДЗ4 с временем t II1 и t II4.
Дистанционная защита - сложная защита, состоящая из ряда элементов (органов), каждый из которых выполняет определенную функцию. На рис. 7.16 представлена упрощенная схема дистанционной защиты со ступенчатой характеристикой выдержки времени. Схема имеет пусковой и дистанционный органы, а также органы направления и выдержки времени.
Пусковой орган ПО выполняет функцию отстройки защиты от нормального режима работы и пускает ее в момент возникновения КЗ. В качестве такого органа в рассматриваемой схеме применено реле сопротивления, реагирующее на ток I р и напряжение U p на зажимах реле.
Дистанционные (или измерительные) органы ДО1 и ДО2 устанавливают меру удаленности места КЗ.
Каждый из них выполнен при помощи реле сопротивления, которое срабатывает при КЗ, если
где Z p - сопротивление на зажимах реле; Z - сопротивление защищаемой линии длиной 1 км; l - длина участка линии до места КЗ, км; Z cp - сопротивление срабатывания реле.
Из приведенного соотношения видно, что сопротивление на зажимах реле Z p пропорционально расстоянию l до места КЗ.
Органы выдержки времени ОВ2 и ОВ3 создают выдержку времени, с которой защита действует на отключение линии при КЗ во второй и третьей зонах. Орган направления OHM разрешает работу защиты при направлении мощности КЗ от шин в линию.
В схеме предусмотрена блокировка БН, выводящая защиту из действия при повреждениях цепей напряжения, питающих защиту. Дело в том, что если при повреждении цепей напряжение на зажимах защиты Uр=0, то Zp=0. Это означает, что и пусковой, и дистанционный органы могут сработать неправильно. Для предотвращения отключения линии при появлении неисправности в цепях напряжения блокировка снимает с защиты постоянный ток и подает сигнал о неисправности цепей напряжения. Оперативный персонал в этом случае обязан быстро восстановить нормальное напряжение на защите. Если по какой-либо причине это не удается выполнить, защиту следует вывести из действия переводом накладки в положение "Отключено".
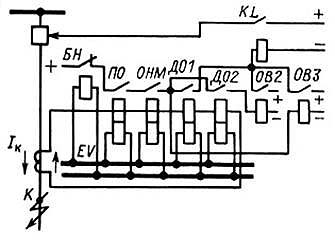
Рис. 7.16. Принципиальная схема дистанционной защиты со ступенчатой характеристикой выдержки времени
Работа защиты.
При КЗ на линии срабатывают реле пускового органа ПО и реле органа направления OHM. Через контакты этих реле плюс постоянного тока поступит на контакты дистанционных органов и на обмотку реле времени третьей зоны ОВ3 и приведет его в действие. Если КЗ находится в первой зоне, дистанционный орган ДО1 замкнет свои контакты и пошлет импульс на отключение выключателя без выдержки времени. При КЗ во второй зоне ДО1 работать не будет, так как значение сопротивления на зажимах его реле будет больше значения сопротивления срабатывания. В этом случае сработает дистанционный орган второй зоны ДО2, который запустит реле времени ОВ2. По истечении выдержки времени второй зоны от реле ОВ2 поступит импульс на отключение линии. Если КЗ произойдет в третьей зоне, дистанционные органы ДО1 и ДО2 работать не будут, так как значения сопротивления на их зажимах больше значений сопротивлений срабатывания. Реле времени ОВ3, запущенное в момент возникновения КЗ контактами реле OHM, доработает и по истечении выдержки времени третьей зоны пошлет импульс на отключение выключателя линии. Дистанционный орган для третьей зоны защиты, как правило, не устанавливается.
В комплекты дистанционных защит входят также устройства, предотвращающие срабатывание защит при качаниях в системе.
[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-4.html]
Тематики
Синонимы
EN
DE
- Distanzschutz, m
FR
импульс набора номера
—
[Л.Г.Суменко. Англо-русский словарь по информационным технологиям. М.: ГП ЦНИИС, 2003.]Тематики
EN
обработка данных
Систематическое осуществление операций над данными.
[ИСО/МЭК 2382-1]
[ ГОСТ Р 52292-2004]
обработка данных
Технологическая операция, в результате которой изменяет свое значение хотя бы один из показателей, характеризующих состояние данных (объем данных при этом не изменяется).
[ ГОСТ Р 51170-98]
обработка данных
- Любое преобразование данных при решении конкретной задачи.
- Работа, выполняемая компьютером.
[ http://www.morepc.ru/dict/]
обработка данных
Процесс приведения данных к виду, удобному для использования. Независимо от вида информации, которая должна быть получена, и типа оборудования любая система О.д. выполняет три основные группы операций: подбор исходных, входных данных (см. Сбор данных), собственно их обработку (в процессе которой система оперирует промежуточными данными), получение и анализ результатов, т.е. выходных данных). Выполняет ли эти операции человек или машина (см. Автоматизированная система обработки данных), все равно они следуют при этом заданному алгоритму (для человека это могут быть инструкция, методика, а для ЭВМ — программа). Важным процессом О.д. является агрегирование, укрупнение их от одной к другой ступени хозяйственной иерархии. Проверка статистических данных, приведение их к сопоставимому виду, сложение, вычитание и другие арифметические операции — тоже процессы О.д. Можно назвать также выборку, отсечение ненужных данных, запоминание, изменение последовательности (упорядочение), классификацию и многие другие. О.д. предшествует во времени принятию решений. Она может производиться эпизодически, периодически (т.е. через заданные промежутки времени), в АСУ — также в реальном масштабе времени. Последнее означает, что О.д. производится с той же скоростью, с какой протекают описываемые ими события, иначе говоря — со скоростью, достаточной для анализа событий и управления их последующим ходом.
[ http://slovar-lopatnikov.ru/]
Тематики
- информационные технологии в целом
- качество служебной информации
- экономика
- электронный обмен информацией
EN
порт пункта назначения
(МСЭ-T G.7041/ Y.1303).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
предварительное сообщение
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
приоритет при отбрасывании
(МСЭ-T G.8010/ Y.1306).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
процессор для обработки данных
—
[Е.С.Алексеев, А.А.Мячев. Англо-русский толковый словарь по системотехнике ЭВМ. Москва 1993]Тематики
EN
Англо-русский словарь нормативно-технической терминологии > DP
-
9 protection de distance
дистанционная защита
-
[В.А.Семенов Англо-русский словарь по релейной защите]
дистанционная защита
Защита с относительной селективностью, срабатывание и селективность которой зависят от измерения в месте ее установки электрических величин, по которым путем сравнения с уставками зон оценивается эквивалентная удаленность повреждения
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
дистанционная защита
Защита, чье действие и селективность основаны на локальном измерении электрических величин, по которым рассчитываются эквивалентные расстояния до места повреждения в пределах установленных зон.
[ http://docs.cntd.ru/document/1200069370]
дистанционная защита
Защита, принцип действия и селективность которой основаны на измерении в месте установки защиты электрических величин, характеризующих повреждение, и сравнении их с уставками зон.
[Циглер Г. Цифровая дистанционная защита: принципы и применение. М.: Энергоиздат. 2005]EN
distance protection
distance relay (US)
a non-unit protection whose operation and selectivity depend on local measurement of electrical quantities from which the equivalent distance to the fault is evaluated by comparing with zone settings
[IEV ref 448-14-01]FR
protection de distance
protection à sélectivité relative de section dont le fonctionnement et la sélectivité dépendent de la mesure locale de grandeurs électriques à partir desquelles la distance équivalente du défaut est évaluée par comparaison avec des réglages de zones
[IEV ref 448-14-01]Дистанционные защиты применяются в сетях сложной конфигурации, где по соображениям быстродействия и чувствительности не могут использоваться более простые максимальные токовые и токовые направленные защиты.
Дистанционной защитой определяется сопротивление (или расстояние - дистанция) до места КЗ, и в зависимости от этого защита срабатывает с меньшей или большей выдержкой времени. Следует уточнить, что современные дистанционные защиты, обладающие ступенчатыми характеристиками времени, не измеряют каждый раз при КЗ значение указанного выше сопротивления на зажимах измерительного органа и не устанавливают в зависимости от этого большую или меньшую выдержку времени, а всего лишь контролируют зону, в которой произошло повреждение. Время срабатывания защиты при КЗ в любой точке рассматриваемой зоны остается неизменным. Каждая защита выполняется многоступенчатой, причем при КЗ в первой зоне, охватывающей 80-85% длины защищаемой линии, время срабатывания защиты не более 0,15 с. Для второй зоны, выходящей за пределы защищаемой линии, выдержка времени на ступень выше и колеблется в пределах 0,4-0,6 с. При КЗ в третьей зоне выдержка времени еще более увеличивается и выбирается так же, как и для направленных токовых защит.
На рис. 7.15 показан участок сети с двухсторонним питанием и приведены согласованные характеристики выдержек времени дистанционных защит (ДЗ). При КЗ, например, в точке К1 - первой зоне действия защит ДЗ3 и ДЗ4 - они сработают с минимальным временем соответственно t I3 и t I4. Защиты ДЗ1 и ДЗ6 также придут в действие, но для них повреждение будет находиться в III зоне, и они могут сработать как резервные с временем t III1 и t III6 только в случае отказа в отключении линии БВ собственными защитами.
Рис. 7.14. Размещение токовых направленных защит нулевой последовательности на участке сетей и характеристики выдержек времени защит:
Р31-Р36 - комплекты токовых направленных защит нулевой последовательности
Рис. 7.15. Защита участка сети дистанционными защитами и характеристики выдержек времени этих защит:
ДЗ1-ДЗ6 - комплекты дистанционных защит; l3 и l4 - расстояния от мест установки защит до места повреждения
При КЗ в точке К2 (шины Б) оно устраняется действием защит ДЗ1 и ДЗ4 с временем t II1 и t II4.
Дистанционная защита - сложная защита, состоящая из ряда элементов (органов), каждый из которых выполняет определенную функцию. На рис. 7.16 представлена упрощенная схема дистанционной защиты со ступенчатой характеристикой выдержки времени. Схема имеет пусковой и дистанционный органы, а также органы направления и выдержки времени.
Пусковой орган ПО выполняет функцию отстройки защиты от нормального режима работы и пускает ее в момент возникновения КЗ. В качестве такого органа в рассматриваемой схеме применено реле сопротивления, реагирующее на ток I р и напряжение U p на зажимах реле.
Дистанционные (или измерительные) органы ДО1 и ДО2 устанавливают меру удаленности места КЗ.
Каждый из них выполнен при помощи реле сопротивления, которое срабатывает при КЗ, если
где Z p - сопротивление на зажимах реле; Z - сопротивление защищаемой линии длиной 1 км; l - длина участка линии до места КЗ, км; Z cp - сопротивление срабатывания реле.
Из приведенного соотношения видно, что сопротивление на зажимах реле Z p пропорционально расстоянию l до места КЗ.
Органы выдержки времени ОВ2 и ОВ3 создают выдержку времени, с которой защита действует на отключение линии при КЗ во второй и третьей зонах. Орган направления OHM разрешает работу защиты при направлении мощности КЗ от шин в линию.
В схеме предусмотрена блокировка БН, выводящая защиту из действия при повреждениях цепей напряжения, питающих защиту. Дело в том, что если при повреждении цепей напряжение на зажимах защиты Uр=0, то Zp=0. Это означает, что и пусковой, и дистанционный органы могут сработать неправильно. Для предотвращения отключения линии при появлении неисправности в цепях напряжения блокировка снимает с защиты постоянный ток и подает сигнал о неисправности цепей напряжения. Оперативный персонал в этом случае обязан быстро восстановить нормальное напряжение на защите. Если по какой-либо причине это не удается выполнить, защиту следует вывести из действия переводом накладки в положение "Отключено".
Рис. 7.16. Принципиальная схема дистанционной защиты со ступенчатой характеристикой выдержки времени
Работа защиты.
При КЗ на линии срабатывают реле пускового органа ПО и реле органа направления OHM. Через контакты этих реле плюс постоянного тока поступит на контакты дистанционных органов и на обмотку реле времени третьей зоны ОВ3 и приведет его в действие. Если КЗ находится в первой зоне, дистанционный орган ДО1 замкнет свои контакты и пошлет импульс на отключение выключателя без выдержки времени. При КЗ во второй зоне ДО1 работать не будет, так как значение сопротивления на зажимах его реле будет больше значения сопротивления срабатывания. В этом случае сработает дистанционный орган второй зоны ДО2, который запустит реле времени ОВ2. По истечении выдержки времени второй зоны от реле ОВ2 поступит импульс на отключение линии. Если КЗ произойдет в третьей зоне, дистанционные органы ДО1 и ДО2 работать не будут, так как значения сопротивления на их зажимах больше значений сопротивлений срабатывания. Реле времени ОВ3, запущенное в момент возникновения КЗ контактами реле OHM, доработает и по истечении выдержки времени третьей зоны пошлет импульс на отключение выключателя линии. Дистанционный орган для третьей зоны защиты, как правило, не устанавливается.
В комплекты дистанционных защит входят также устройства, предотвращающие срабатывание защит при качаниях в системе.
[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-4.html]
Тематики
Синонимы
EN
DE
- Distanzschutz, m
FR
Франко-русский словарь нормативно-технической терминологии > protection de distance
-
10 Distanzschutz, m
дистанционная защита
-
[В.А.Семенов Англо-русский словарь по релейной защите]
дистанционная защита
Защита с относительной селективностью, срабатывание и селективность которой зависят от измерения в месте ее установки электрических величин, по которым путем сравнения с уставками зон оценивается эквивалентная удаленность повреждения
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
дистанционная защита
Защита, чье действие и селективность основаны на локальном измерении электрических величин, по которым рассчитываются эквивалентные расстояния до места повреждения в пределах установленных зон.
[ http://docs.cntd.ru/document/1200069370]
дистанционная защита
Защита, принцип действия и селективность которой основаны на измерении в месте установки защиты электрических величин, характеризующих повреждение, и сравнении их с уставками зон.
[Циглер Г. Цифровая дистанционная защита: принципы и применение. М.: Энергоиздат. 2005]EN
distance protection
distance relay (US)
a non-unit protection whose operation and selectivity depend on local measurement of electrical quantities from which the equivalent distance to the fault is evaluated by comparing with zone settings
[IEV ref 448-14-01]FR
protection de distance
protection à sélectivité relative de section dont le fonctionnement et la sélectivité dépendent de la mesure locale de grandeurs électriques à partir desquelles la distance équivalente du défaut est évaluée par comparaison avec des réglages de zones
[IEV ref 448-14-01]Дистанционные защиты применяются в сетях сложной конфигурации, где по соображениям быстродействия и чувствительности не могут использоваться более простые максимальные токовые и токовые направленные защиты.
Дистанционной защитой определяется сопротивление (или расстояние - дистанция) до места КЗ, и в зависимости от этого защита срабатывает с меньшей или большей выдержкой времени. Следует уточнить, что современные дистанционные защиты, обладающие ступенчатыми характеристиками времени, не измеряют каждый раз при КЗ значение указанного выше сопротивления на зажимах измерительного органа и не устанавливают в зависимости от этого большую или меньшую выдержку времени, а всего лишь контролируют зону, в которой произошло повреждение. Время срабатывания защиты при КЗ в любой точке рассматриваемой зоны остается неизменным. Каждая защита выполняется многоступенчатой, причем при КЗ в первой зоне, охватывающей 80-85% длины защищаемой линии, время срабатывания защиты не более 0,15 с. Для второй зоны, выходящей за пределы защищаемой линии, выдержка времени на ступень выше и колеблется в пределах 0,4-0,6 с. При КЗ в третьей зоне выдержка времени еще более увеличивается и выбирается так же, как и для направленных токовых защит.
На рис. 7.15 показан участок сети с двухсторонним питанием и приведены согласованные характеристики выдержек времени дистанционных защит (ДЗ). При КЗ, например, в точке К1 - первой зоне действия защит ДЗ3 и ДЗ4 - они сработают с минимальным временем соответственно t I3 и t I4. Защиты ДЗ1 и ДЗ6 также придут в действие, но для них повреждение будет находиться в III зоне, и они могут сработать как резервные с временем t III1 и t III6 только в случае отказа в отключении линии БВ собственными защитами.
Рис. 7.14. Размещение токовых направленных защит нулевой последовательности на участке сетей и характеристики выдержек времени защит:
Р31-Р36 - комплекты токовых направленных защит нулевой последовательности
Рис. 7.15. Защита участка сети дистанционными защитами и характеристики выдержек времени этих защит:
ДЗ1-ДЗ6 - комплекты дистанционных защит; l3 и l4 - расстояния от мест установки защит до места повреждения
При КЗ в точке К2 (шины Б) оно устраняется действием защит ДЗ1 и ДЗ4 с временем t II1 и t II4.
Дистанционная защита - сложная защита, состоящая из ряда элементов (органов), каждый из которых выполняет определенную функцию. На рис. 7.16 представлена упрощенная схема дистанционной защиты со ступенчатой характеристикой выдержки времени. Схема имеет пусковой и дистанционный органы, а также органы направления и выдержки времени.
Пусковой орган ПО выполняет функцию отстройки защиты от нормального режима работы и пускает ее в момент возникновения КЗ. В качестве такого органа в рассматриваемой схеме применено реле сопротивления, реагирующее на ток I р и напряжение U p на зажимах реле.
Дистанционные (или измерительные) органы ДО1 и ДО2 устанавливают меру удаленности места КЗ.
Каждый из них выполнен при помощи реле сопротивления, которое срабатывает при КЗ, если
где Z p - сопротивление на зажимах реле; Z - сопротивление защищаемой линии длиной 1 км; l - длина участка линии до места КЗ, км; Z cp - сопротивление срабатывания реле.
Из приведенного соотношения видно, что сопротивление на зажимах реле Z p пропорционально расстоянию l до места КЗ.
Органы выдержки времени ОВ2 и ОВ3 создают выдержку времени, с которой защита действует на отключение линии при КЗ во второй и третьей зонах. Орган направления OHM разрешает работу защиты при направлении мощности КЗ от шин в линию.
В схеме предусмотрена блокировка БН, выводящая защиту из действия при повреждениях цепей напряжения, питающих защиту. Дело в том, что если при повреждении цепей напряжение на зажимах защиты Uр=0, то Zp=0. Это означает, что и пусковой, и дистанционный органы могут сработать неправильно. Для предотвращения отключения линии при появлении неисправности в цепях напряжения блокировка снимает с защиты постоянный ток и подает сигнал о неисправности цепей напряжения. Оперативный персонал в этом случае обязан быстро восстановить нормальное напряжение на защите. Если по какой-либо причине это не удается выполнить, защиту следует вывести из действия переводом накладки в положение "Отключено".
Рис. 7.16. Принципиальная схема дистанционной защиты со ступенчатой характеристикой выдержки времени
Работа защиты.
При КЗ на линии срабатывают реле пускового органа ПО и реле органа направления OHM. Через контакты этих реле плюс постоянного тока поступит на контакты дистанционных органов и на обмотку реле времени третьей зоны ОВ3 и приведет его в действие. Если КЗ находится в первой зоне, дистанционный орган ДО1 замкнет свои контакты и пошлет импульс на отключение выключателя без выдержки времени. При КЗ во второй зоне ДО1 работать не будет, так как значение сопротивления на зажимах его реле будет больше значения сопротивления срабатывания. В этом случае сработает дистанционный орган второй зоны ДО2, который запустит реле времени ОВ2. По истечении выдержки времени второй зоны от реле ОВ2 поступит импульс на отключение линии. Если КЗ произойдет в третьей зоне, дистанционные органы ДО1 и ДО2 работать не будут, так как значения сопротивления на их зажимах больше значений сопротивлений срабатывания. Реле времени ОВ3, запущенное в момент возникновения КЗ контактами реле OHM, доработает и по истечении выдержки времени третьей зоны пошлет импульс на отключение выключателя линии. Дистанционный орган для третьей зоны защиты, как правило, не устанавливается.
В комплекты дистанционных защит входят также устройства, предотвращающие срабатывание защит при качаниях в системе.
[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-4.html]
Тематики
Синонимы
EN
DE
- Distanzschutz, m
FR
Немецко-русский словарь нормативно-технической терминологии > Distanzschutz, m
-
11 distance protection
дистанционная защита
-
[В.А.Семенов Англо-русский словарь по релейной защите]
дистанционная защита
Защита с относительной селективностью, срабатывание и селективность которой зависят от измерения в месте ее установки электрических величин, по которым путем сравнения с уставками зон оценивается эквивалентная удаленность повреждения
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
дистанционная защита
Защита, чье действие и селективность основаны на локальном измерении электрических величин, по которым рассчитываются эквивалентные расстояния до места повреждения в пределах установленных зон.
[ http://docs.cntd.ru/document/1200069370]
дистанционная защита
Защита, принцип действия и селективность которой основаны на измерении в месте установки защиты электрических величин, характеризующих повреждение, и сравнении их с уставками зон.
[Циглер Г. Цифровая дистанционная защита: принципы и применение. М.: Энергоиздат. 2005]EN
distance protection
distance relay (US)
a non-unit protection whose operation and selectivity depend on local measurement of electrical quantities from which the equivalent distance to the fault is evaluated by comparing with zone settings
[IEV ref 448-14-01]FR
protection de distance
protection à sélectivité relative de section dont le fonctionnement et la sélectivité dépendent de la mesure locale de grandeurs électriques à partir desquelles la distance équivalente du défaut est évaluée par comparaison avec des réglages de zones
[IEV ref 448-14-01]Дистанционные защиты применяются в сетях сложной конфигурации, где по соображениям быстродействия и чувствительности не могут использоваться более простые максимальные токовые и токовые направленные защиты.
Дистанционной защитой определяется сопротивление (или расстояние - дистанция) до места КЗ, и в зависимости от этого защита срабатывает с меньшей или большей выдержкой времени. Следует уточнить, что современные дистанционные защиты, обладающие ступенчатыми характеристиками времени, не измеряют каждый раз при КЗ значение указанного выше сопротивления на зажимах измерительного органа и не устанавливают в зависимости от этого большую или меньшую выдержку времени, а всего лишь контролируют зону, в которой произошло повреждение. Время срабатывания защиты при КЗ в любой точке рассматриваемой зоны остается неизменным. Каждая защита выполняется многоступенчатой, причем при КЗ в первой зоне, охватывающей 80-85% длины защищаемой линии, время срабатывания защиты не более 0,15 с. Для второй зоны, выходящей за пределы защищаемой линии, выдержка времени на ступень выше и колеблется в пределах 0,4-0,6 с. При КЗ в третьей зоне выдержка времени еще более увеличивается и выбирается так же, как и для направленных токовых защит.
На рис. 7.15 показан участок сети с двухсторонним питанием и приведены согласованные характеристики выдержек времени дистанционных защит (ДЗ). При КЗ, например, в точке К1 - первой зоне действия защит ДЗ3 и ДЗ4 - они сработают с минимальным временем соответственно t I3 и t I4. Защиты ДЗ1 и ДЗ6 также придут в действие, но для них повреждение будет находиться в III зоне, и они могут сработать как резервные с временем t III1 и t III6 только в случае отказа в отключении линии БВ собственными защитами.
Рис. 7.14. Размещение токовых направленных защит нулевой последовательности на участке сетей и характеристики выдержек времени защит:
Р31-Р36 - комплекты токовых направленных защит нулевой последовательности
Рис. 7.15. Защита участка сети дистанционными защитами и характеристики выдержек времени этих защит:
ДЗ1-ДЗ6 - комплекты дистанционных защит; l3 и l4 - расстояния от мест установки защит до места повреждения
При КЗ в точке К2 (шины Б) оно устраняется действием защит ДЗ1 и ДЗ4 с временем t II1 и t II4.
Дистанционная защита - сложная защита, состоящая из ряда элементов (органов), каждый из которых выполняет определенную функцию. На рис. 7.16 представлена упрощенная схема дистанционной защиты со ступенчатой характеристикой выдержки времени. Схема имеет пусковой и дистанционный органы, а также органы направления и выдержки времени.
Пусковой орган ПО выполняет функцию отстройки защиты от нормального режима работы и пускает ее в момент возникновения КЗ. В качестве такого органа в рассматриваемой схеме применено реле сопротивления, реагирующее на ток I р и напряжение U p на зажимах реле.
Дистанционные (или измерительные) органы ДО1 и ДО2 устанавливают меру удаленности места КЗ.
Каждый из них выполнен при помощи реле сопротивления, которое срабатывает при КЗ, если
где Z p - сопротивление на зажимах реле; Z - сопротивление защищаемой линии длиной 1 км; l - длина участка линии до места КЗ, км; Z cp - сопротивление срабатывания реле.
Из приведенного соотношения видно, что сопротивление на зажимах реле Z p пропорционально расстоянию l до места КЗ.
Органы выдержки времени ОВ2 и ОВ3 создают выдержку времени, с которой защита действует на отключение линии при КЗ во второй и третьей зонах. Орган направления OHM разрешает работу защиты при направлении мощности КЗ от шин в линию.
В схеме предусмотрена блокировка БН, выводящая защиту из действия при повреждениях цепей напряжения, питающих защиту. Дело в том, что если при повреждении цепей напряжение на зажимах защиты Uр=0, то Zp=0. Это означает, что и пусковой, и дистанционный органы могут сработать неправильно. Для предотвращения отключения линии при появлении неисправности в цепях напряжения блокировка снимает с защиты постоянный ток и подает сигнал о неисправности цепей напряжения. Оперативный персонал в этом случае обязан быстро восстановить нормальное напряжение на защите. Если по какой-либо причине это не удается выполнить, защиту следует вывести из действия переводом накладки в положение "Отключено".
Рис. 7.16. Принципиальная схема дистанционной защиты со ступенчатой характеристикой выдержки времени
Работа защиты.
При КЗ на линии срабатывают реле пускового органа ПО и реле органа направления OHM. Через контакты этих реле плюс постоянного тока поступит на контакты дистанционных органов и на обмотку реле времени третьей зоны ОВ3 и приведет его в действие. Если КЗ находится в первой зоне, дистанционный орган ДО1 замкнет свои контакты и пошлет импульс на отключение выключателя без выдержки времени. При КЗ во второй зоне ДО1 работать не будет, так как значение сопротивления на зажимах его реле будет больше значения сопротивления срабатывания. В этом случае сработает дистанционный орган второй зоны ДО2, который запустит реле времени ОВ2. По истечении выдержки времени второй зоны от реле ОВ2 поступит импульс на отключение линии. Если КЗ произойдет в третьей зоне, дистанционные органы ДО1 и ДО2 работать не будут, так как значения сопротивления на их зажимах больше значений сопротивлений срабатывания. Реле времени ОВ3, запущенное в момент возникновения КЗ контактами реле OHM, доработает и по истечении выдержки времени третьей зоны пошлет импульс на отключение выключателя линии. Дистанционный орган для третьей зоны защиты, как правило, не устанавливается.
В комплекты дистанционных защит входят также устройства, предотвращающие срабатывание защит при качаниях в системе.
[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-4.html]
Тематики
Синонимы
EN
DE
- Distanzschutz, m
FR
Англо-русский словарь нормативно-технической терминологии > distance protection
-
12 distance relay (US)
дистанционная защита
-
[В.А.Семенов Англо-русский словарь по релейной защите]
дистанционная защита
Защита с относительной селективностью, срабатывание и селективность которой зависят от измерения в месте ее установки электрических величин, по которым путем сравнения с уставками зон оценивается эквивалентная удаленность повреждения
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
дистанционная защита
Защита, чье действие и селективность основаны на локальном измерении электрических величин, по которым рассчитываются эквивалентные расстояния до места повреждения в пределах установленных зон.
[ http://docs.cntd.ru/document/1200069370]
дистанционная защита
Защита, принцип действия и селективность которой основаны на измерении в месте установки защиты электрических величин, характеризующих повреждение, и сравнении их с уставками зон.
[Циглер Г. Цифровая дистанционная защита: принципы и применение. М.: Энергоиздат. 2005]EN
distance protection
distance relay (US)
a non-unit protection whose operation and selectivity depend on local measurement of electrical quantities from which the equivalent distance to the fault is evaluated by comparing with zone settings
[IEV ref 448-14-01]FR
protection de distance
protection à sélectivité relative de section dont le fonctionnement et la sélectivité dépendent de la mesure locale de grandeurs électriques à partir desquelles la distance équivalente du défaut est évaluée par comparaison avec des réglages de zones
[IEV ref 448-14-01]Дистанционные защиты применяются в сетях сложной конфигурации, где по соображениям быстродействия и чувствительности не могут использоваться более простые максимальные токовые и токовые направленные защиты.
Дистанционной защитой определяется сопротивление (или расстояние - дистанция) до места КЗ, и в зависимости от этого защита срабатывает с меньшей или большей выдержкой времени. Следует уточнить, что современные дистанционные защиты, обладающие ступенчатыми характеристиками времени, не измеряют каждый раз при КЗ значение указанного выше сопротивления на зажимах измерительного органа и не устанавливают в зависимости от этого большую или меньшую выдержку времени, а всего лишь контролируют зону, в которой произошло повреждение. Время срабатывания защиты при КЗ в любой точке рассматриваемой зоны остается неизменным. Каждая защита выполняется многоступенчатой, причем при КЗ в первой зоне, охватывающей 80-85% длины защищаемой линии, время срабатывания защиты не более 0,15 с. Для второй зоны, выходящей за пределы защищаемой линии, выдержка времени на ступень выше и колеблется в пределах 0,4-0,6 с. При КЗ в третьей зоне выдержка времени еще более увеличивается и выбирается так же, как и для направленных токовых защит.
На рис. 7.15 показан участок сети с двухсторонним питанием и приведены согласованные характеристики выдержек времени дистанционных защит (ДЗ). При КЗ, например, в точке К1 - первой зоне действия защит ДЗ3 и ДЗ4 - они сработают с минимальным временем соответственно t I3 и t I4. Защиты ДЗ1 и ДЗ6 также придут в действие, но для них повреждение будет находиться в III зоне, и они могут сработать как резервные с временем t III1 и t III6 только в случае отказа в отключении линии БВ собственными защитами.
Рис. 7.14. Размещение токовых направленных защит нулевой последовательности на участке сетей и характеристики выдержек времени защит:
Р31-Р36 - комплекты токовых направленных защит нулевой последовательности
Рис. 7.15. Защита участка сети дистанционными защитами и характеристики выдержек времени этих защит:
ДЗ1-ДЗ6 - комплекты дистанционных защит; l3 и l4 - расстояния от мест установки защит до места повреждения
При КЗ в точке К2 (шины Б) оно устраняется действием защит ДЗ1 и ДЗ4 с временем t II1 и t II4.
Дистанционная защита - сложная защита, состоящая из ряда элементов (органов), каждый из которых выполняет определенную функцию. На рис. 7.16 представлена упрощенная схема дистанционной защиты со ступенчатой характеристикой выдержки времени. Схема имеет пусковой и дистанционный органы, а также органы направления и выдержки времени.
Пусковой орган ПО выполняет функцию отстройки защиты от нормального режима работы и пускает ее в момент возникновения КЗ. В качестве такого органа в рассматриваемой схеме применено реле сопротивления, реагирующее на ток I р и напряжение U p на зажимах реле.
Дистанционные (или измерительные) органы ДО1 и ДО2 устанавливают меру удаленности места КЗ.
Каждый из них выполнен при помощи реле сопротивления, которое срабатывает при КЗ, если
где Z p - сопротивление на зажимах реле; Z - сопротивление защищаемой линии длиной 1 км; l - длина участка линии до места КЗ, км; Z cp - сопротивление срабатывания реле.
Из приведенного соотношения видно, что сопротивление на зажимах реле Z p пропорционально расстоянию l до места КЗ.
Органы выдержки времени ОВ2 и ОВ3 создают выдержку времени, с которой защита действует на отключение линии при КЗ во второй и третьей зонах. Орган направления OHM разрешает работу защиты при направлении мощности КЗ от шин в линию.
В схеме предусмотрена блокировка БН, выводящая защиту из действия при повреждениях цепей напряжения, питающих защиту. Дело в том, что если при повреждении цепей напряжение на зажимах защиты Uр=0, то Zp=0. Это означает, что и пусковой, и дистанционный органы могут сработать неправильно. Для предотвращения отключения линии при появлении неисправности в цепях напряжения блокировка снимает с защиты постоянный ток и подает сигнал о неисправности цепей напряжения. Оперативный персонал в этом случае обязан быстро восстановить нормальное напряжение на защите. Если по какой-либо причине это не удается выполнить, защиту следует вывести из действия переводом накладки в положение "Отключено".
Рис. 7.16. Принципиальная схема дистанционной защиты со ступенчатой характеристикой выдержки времени
Работа защиты.
При КЗ на линии срабатывают реле пускового органа ПО и реле органа направления OHM. Через контакты этих реле плюс постоянного тока поступит на контакты дистанционных органов и на обмотку реле времени третьей зоны ОВ3 и приведет его в действие. Если КЗ находится в первой зоне, дистанционный орган ДО1 замкнет свои контакты и пошлет импульс на отключение выключателя без выдержки времени. При КЗ во второй зоне ДО1 работать не будет, так как значение сопротивления на зажимах его реле будет больше значения сопротивления срабатывания. В этом случае сработает дистанционный орган второй зоны ДО2, который запустит реле времени ОВ2. По истечении выдержки времени второй зоны от реле ОВ2 поступит импульс на отключение линии. Если КЗ произойдет в третьей зоне, дистанционные органы ДО1 и ДО2 работать не будут, так как значения сопротивления на их зажимах больше значений сопротивлений срабатывания. Реле времени ОВ3, запущенное в момент возникновения КЗ контактами реле OHM, доработает и по истечении выдержки времени третьей зоны пошлет импульс на отключение выключателя линии. Дистанционный орган для третьей зоны защиты, как правило, не устанавливается.
В комплекты дистанционных защит входят также устройства, предотвращающие срабатывание защит при качаниях в системе.
[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-4.html]
Тематики
Синонимы
EN
DE
- Distanzschutz, m
FR
Англо-русский словарь нормативно-технической терминологии > distance relay (US)
-
13 impedance protection
дистанционная защита
-
[В.А.Семенов Англо-русский словарь по релейной защите]
дистанционная защита
Защита с относительной селективностью, срабатывание и селективность которой зависят от измерения в месте ее установки электрических величин, по которым путем сравнения с уставками зон оценивается эквивалентная удаленность повреждения
[Разработка типовых структурных схем микропроцессорных устройств РЗА на объектах ОАО "ФКС ЕЭС". Пояснительная записка. Новосибирск 2006 г.]
дистанционная защита
Защита, чье действие и селективность основаны на локальном измерении электрических величин, по которым рассчитываются эквивалентные расстояния до места повреждения в пределах установленных зон.
[ http://docs.cntd.ru/document/1200069370]
дистанционная защита
Защита, принцип действия и селективность которой основаны на измерении в месте установки защиты электрических величин, характеризующих повреждение, и сравнении их с уставками зон.
[Циглер Г. Цифровая дистанционная защита: принципы и применение. М.: Энергоиздат. 2005]EN
distance protection
distance relay (US)
a non-unit protection whose operation and selectivity depend on local measurement of electrical quantities from which the equivalent distance to the fault is evaluated by comparing with zone settings
[IEV ref 448-14-01]FR
protection de distance
protection à sélectivité relative de section dont le fonctionnement et la sélectivité dépendent de la mesure locale de grandeurs électriques à partir desquelles la distance équivalente du défaut est évaluée par comparaison avec des réglages de zones
[IEV ref 448-14-01]Дистанционные защиты применяются в сетях сложной конфигурации, где по соображениям быстродействия и чувствительности не могут использоваться более простые максимальные токовые и токовые направленные защиты.
Дистанционной защитой определяется сопротивление (или расстояние - дистанция) до места КЗ, и в зависимости от этого защита срабатывает с меньшей или большей выдержкой времени. Следует уточнить, что современные дистанционные защиты, обладающие ступенчатыми характеристиками времени, не измеряют каждый раз при КЗ значение указанного выше сопротивления на зажимах измерительного органа и не устанавливают в зависимости от этого большую или меньшую выдержку времени, а всего лишь контролируют зону, в которой произошло повреждение. Время срабатывания защиты при КЗ в любой точке рассматриваемой зоны остается неизменным. Каждая защита выполняется многоступенчатой, причем при КЗ в первой зоне, охватывающей 80-85% длины защищаемой линии, время срабатывания защиты не более 0,15 с. Для второй зоны, выходящей за пределы защищаемой линии, выдержка времени на ступень выше и колеблется в пределах 0,4-0,6 с. При КЗ в третьей зоне выдержка времени еще более увеличивается и выбирается так же, как и для направленных токовых защит.
На рис. 7.15 показан участок сети с двухсторонним питанием и приведены согласованные характеристики выдержек времени дистанционных защит (ДЗ). При КЗ, например, в точке К1 - первой зоне действия защит ДЗ3 и ДЗ4 - они сработают с минимальным временем соответственно t I3 и t I4. Защиты ДЗ1 и ДЗ6 также придут в действие, но для них повреждение будет находиться в III зоне, и они могут сработать как резервные с временем t III1 и t III6 только в случае отказа в отключении линии БВ собственными защитами.
Рис. 7.14. Размещение токовых направленных защит нулевой последовательности на участке сетей и характеристики выдержек времени защит:
Р31-Р36 - комплекты токовых направленных защит нулевой последовательности
Рис. 7.15. Защита участка сети дистанционными защитами и характеристики выдержек времени этих защит:
ДЗ1-ДЗ6 - комплекты дистанционных защит; l3 и l4 - расстояния от мест установки защит до места повреждения
При КЗ в точке К2 (шины Б) оно устраняется действием защит ДЗ1 и ДЗ4 с временем t II1 и t II4.
Дистанционная защита - сложная защита, состоящая из ряда элементов (органов), каждый из которых выполняет определенную функцию. На рис. 7.16 представлена упрощенная схема дистанционной защиты со ступенчатой характеристикой выдержки времени. Схема имеет пусковой и дистанционный органы, а также органы направления и выдержки времени.
Пусковой орган ПО выполняет функцию отстройки защиты от нормального режима работы и пускает ее в момент возникновения КЗ. В качестве такого органа в рассматриваемой схеме применено реле сопротивления, реагирующее на ток I р и напряжение U p на зажимах реле.
Дистанционные (или измерительные) органы ДО1 и ДО2 устанавливают меру удаленности места КЗ.
Каждый из них выполнен при помощи реле сопротивления, которое срабатывает при КЗ, если
где Z p - сопротивление на зажимах реле; Z - сопротивление защищаемой линии длиной 1 км; l - длина участка линии до места КЗ, км; Z cp - сопротивление срабатывания реле.
Из приведенного соотношения видно, что сопротивление на зажимах реле Z p пропорционально расстоянию l до места КЗ.
Органы выдержки времени ОВ2 и ОВ3 создают выдержку времени, с которой защита действует на отключение линии при КЗ во второй и третьей зонах. Орган направления OHM разрешает работу защиты при направлении мощности КЗ от шин в линию.
В схеме предусмотрена блокировка БН, выводящая защиту из действия при повреждениях цепей напряжения, питающих защиту. Дело в том, что если при повреждении цепей напряжение на зажимах защиты Uр=0, то Zp=0. Это означает, что и пусковой, и дистанционный органы могут сработать неправильно. Для предотвращения отключения линии при появлении неисправности в цепях напряжения блокировка снимает с защиты постоянный ток и подает сигнал о неисправности цепей напряжения. Оперативный персонал в этом случае обязан быстро восстановить нормальное напряжение на защите. Если по какой-либо причине это не удается выполнить, защиту следует вывести из действия переводом накладки в положение "Отключено".
Рис. 7.16. Принципиальная схема дистанционной защиты со ступенчатой характеристикой выдержки времени
Работа защиты.
При КЗ на линии срабатывают реле пускового органа ПО и реле органа направления OHM. Через контакты этих реле плюс постоянного тока поступит на контакты дистанционных органов и на обмотку реле времени третьей зоны ОВ3 и приведет его в действие. Если КЗ находится в первой зоне, дистанционный орган ДО1 замкнет свои контакты и пошлет импульс на отключение выключателя без выдержки времени. При КЗ во второй зоне ДО1 работать не будет, так как значение сопротивления на зажимах его реле будет больше значения сопротивления срабатывания. В этом случае сработает дистанционный орган второй зоны ДО2, который запустит реле времени ОВ2. По истечении выдержки времени второй зоны от реле ОВ2 поступит импульс на отключение линии. Если КЗ произойдет в третьей зоне, дистанционные органы ДО1 и ДО2 работать не будут, так как значения сопротивления на их зажимах больше значений сопротивлений срабатывания. Реле времени ОВ3, запущенное в момент возникновения КЗ контактами реле OHM, доработает и по истечении выдержки времени третьей зоны пошлет импульс на отключение выключателя линии. Дистанционный орган для третьей зоны защиты, как правило, не устанавливается.
В комплекты дистанционных защит входят также устройства, предотвращающие срабатывание защит при качаниях в системе.
[ http://leg.co.ua/knigi/raznoe/obsluzhivanie-ustroystv-releynoy-zaschity-i-avtomatiki-4.html]
Тематики
Синонимы
EN
DE
- Distanzschutz, m
FR
защита полного сопротивления
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > impedance protection
-
14 time
1. n время выполнения2. n период времениit took him a long time to do it, he took a long time doing it — ему потребовалось немало времени, чтобы сделать это; он немало с этим провозился
all the time, the whole time — всё время, всегда
all the time we were working — в течение всего времени, что мы работали
at one time — одно время, когда-то
for the time being — пока, до поры до времени
I think that we may win in time — думаю, что со временем нам удастся победить
in no time, in less than no time — очень быстро, мигом, в два счёта
in the same flash of time — в то же мгновение, в тот же миг
to tell the time — показывать время; показывать, который час
time interrupt — временное прерывание; прерывание по времени
3. n сезон, пора, времяsowing time — время сева, посевной период, посевная
4. n долгое времяhe was gone time before you got there — он ушёл задолго до того, как вы туда явились
settling time — время установления сигнала; время успокоения
reversal time — время реверсирования; время перемагничивания
5. n час, точное времяwhat time, at what time — в какое время, в котором часу; когда
6. n момент, мгновение; определённый момент, определённое времяsome time — в какой-то момент, в какое-то время
some time — когда-нибудь, рано или поздно
at times — по временам, время от времени
at the time — в тот момент, в то время
at the same time — в то же самое время, одновременно; в тот же момент
at any time you like — в любой момент, когда вам будет удобно
at the proper time, when the time comes — в своё время, когда придёт время
we shall do everything at the proper time — мы всё сделаем, когда нужно;
between times — иногда, временами
block-to-block time — время, затраченное на выполнение рейса
travel time — время, необходимое на переходы в часы работы
time modulation — временная модуляция; модуляция по времени
7. n время прибытия или отправления8. n срок, времяin time — в срок, вовремя
in due time — в своё время, своевременно
I was just in time to see it — я успел как раз вовремя, чтобы увидеть это
behind time, out of time — поздно, с опозданием
high time — давно пора, самое время
time! — время вышло!; ваше время истекло
time is drawing on — времени остаётся мало, срок приближается
9. n подходящий момент, подходящее время10. n времена, пора; эпоха, эраour time — наше время, наши дни
the times we live in — наши дни; время, в которое мы живём
at all times, all the time — всегда, во все времена
a book unusual for its time — книга, необычная для своего времени
from time immemorial — с незапамятных времён, испокон веку ; искони, исстари
old time — старое время; в древности, в стародавние времена, во время оно
in happier times — в более счастливые времена, в более счастливую пору
in times to come — в будущем, в грядущие времена
abreast of the times — вровень с веком; не отставая от жизни
to be abreast of the times, to move with the times — стоять вровень с веком, не отставать от жизни, шагать в ногу со временем
ahead of the time — опередивший свою эпоху, передовой
other times, other manners — иные времена — иные нравы
11. n возрастat his time of life — в его возрасте, в его годы
12. n период жизни, векit was before her time — это было до её рождения; она этого уже не застала
he died before his time — он безвременно умер;
debug time — время отладки; период отладки
13. n свободное время; досугto have no time, to be hard pressed for time — совершенно не иметь времени, торопиться
to make up for lost time — наверстать упущенное; компенсировать потери времени
to save time — экономить время, не терять попусту времени
I need time to rest — мне нужно время, чтобы отдохнуть
switching time — время переключения; время перемагничивания
response time — время ответа, время реакции; время отклика
14. n время; времяпрепровождениеto have a good time — хорошо провести время, повеселиться
one-pulse time — время действия импульса; импульсный период
15. n рабочее времяGreenwich time — время по Гринвичу, среднеевропейское время
16. n плата за работу17. n интервал между раундами18. n тайм; период, половина игрыTime Inc. — Тайм инк.
19. n скорость, темп; такт; размер; ритмto keep time — отбивать такт; выдерживать такт
20. n стих. мора21. n библ. год22. a связанный с временем23. a снабжённый часовым механизмом24. a связанный с покупками в кредит или с платежами в рассрочкуseeding time — время сева, посевная страда, сев
time base — временная ось; масштаб по оси времени
25. a подлежащий оплате в определённый срокtime wage — повременная, подённая оплата
26. v выбирать время; рассчитыватьturnover time — время переключения; время перемагничивания
to snooze time away — бездельничать, растранжиривать время
27. v назначать или устанавливать время; приурочиватьseasoning time — время, необходимое для полного увлажнения
28. v ставить29. v задавать темп; регулировать30. v отмечать по часам; засекать; определять время; хронометрироватьcore time — часы, когда все сотрудники должны быть на работе
mercifully, he came in time — к счастью, он пришёл вовремя
31. v рассчитывать, устанавливать продолжительностьclockwork apparatus timed to run for forty-eight hours — часовой механизм, рассчитанный на двое суток работы
32. v выделять время для определённого процесса33. v делать в такт34. v редк. совпадать, биться в унисонin double-quick time — быстро, в два счёта
35. v тех. синхронизироватьСинонимический ряд:1. duration (noun) continuance; duration; future; interval; lastingness; past; present; span; stretch; term; year2. era (noun) age; cycle; date; day; days; epoch; era; generation; period; season3. go (noun) bout; go; hitch; innings; shift; spell; stint; tour; trick; turn; watch4. hour (noun) hour; instant; minute; moment; occasion5. opportunity (noun) break; chance; leisure; liberty; look-in; opening; opportunity; shot; show; squeak6. tempo (noun) beat; cadence; measure; pace; rate; rhythm; swing; tempo7. while (noun) bit; space; spell; stretch; while8. adjust (verb) adjust; set; synchronize9. book (verb) book; schedule10. gauge (verb) clock; gauge; measure; regulate -
15 automate programmable à mémoire
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего. Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы. Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7. Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series. Рис. 4. Резервированный контроллер FCP270.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA). Рис. 5. Контроллер AC800M.
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Франко-русский словарь нормативно-технической терминологии > automate programmable à mémoire
16 speicherprogrammierbare Steuerung, f
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Немецко-русский словарь нормативно-технической терминологии > speicherprogrammierbare Steuerung, f
17 plc
- связь по ЛЭП
- программируемый логический контроллер
- несущая в канале ВЧ-связи по ЛЭП
- маскирование потери пакета
- контроллер с программируемой логикой
- акционерная компания с ограниченной ответственностью
акционерная компания с ограниченной ответственностью
AG - аббревиатура для обозначения AKTIENGESELLSCHAFT (акционерное общество). Оно пишется после названия немецких, австрийских или швейцарских компаний и является эквивалентом английской аббревиатуры plc (public limited company-акционерная компания с ограниченной ответственностью). Сравни: GmbH.
[ http://www.vocable.ru/dictionary/533/symbol/97]Тематики
EN
DE
- AG
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
маскирование потери пакета
Метод сокрытия факта потери медиапакетов путем генерирования синтезируемых пакетов (МСЭ-T G.1050).
[ http://www.iks-media.ru/glossary/index.html?glossid=2400324]Тематики
- электросвязь, основные понятия
EN
несущая в канале ВЧ-связи по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
связь по ЛЭП
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
Англо-русский словарь нормативно-технической терминологии > plc
18 programmable logic controller
контроллер с программируемой логикой
—
[А.С.Гольдберг. Англо-русский энергетический словарь. 2006 г.]Тематики
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable logic controller
19 programmable controller
программируемый контроллер
—
[Я.Н.Лугинский, М.С.Фези-Жилинская, Ю.С.Кабиров. Англо-русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.]Тематики
- электротехника, основные понятия
EN
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > programmable controller
20 storage-programmable logic controller
программируемый логический контроллер
ПЛК
-
[Интент]
контроллер
Управляющее устройство, осуществляющее автоматическое управление посредством программной реализации алгоритмов управления.
[Сборник рекомендуемых терминов. Выпуск 107. Теория управления.
Академия наук СССР. Комитет научно-технической терминологии. 1984 г.]EN
storage-programmable logic controller
computer-aided control equipment or system whose logic sequence can be varied via a directly or remote-control connected programming device, for example a control panel, a host computer or a portable terminal
[IEV ref 351-32-34]FR
automate programmable à mémoire
См. также:
équipement ou système de commande assisté par ordinateur dont la séquence logique peut être modifiée directement ou par l'intermédiaire d'un dispositif de programmation relié à une télécommande, par exemple un panneau de commande, un ordinateur hôte ou un terminal de données portatif
[IEV ref 351-32-34]
- архитектура контроллера;
- производительность контроллера;
- время реакции контроллера;
КЛАССИФИКАЦИЯ
Основным показателем ПЛК является количество каналов ввода-вывода. По этому признаку ПЛК делятся на следующие группы:- нано- ПЛК (менее 16 каналов);
- микро-ПЛК (более 16, до 100 каналов);
- средние (более 100, до 500 каналов);
- большие (более 500 каналов).
- моноблочными - в которых устройство ввода-вывода не может быть удалено из контроллера или заменено на другое. Конструктивно контроллер представляет собой единое целое с устройствами ввода-вывода (например, одноплатный контроллер). Моноблочный контроллер может иметь, например, 16 каналов дискретного ввода и 8 каналов релейного вывода;
- модульные - состоящие из общей корзины (шасси), в которой располагаются модуль центрального процессора и сменные модули ввода-вывода. Состав модулей выбирается пользователем в зависимости от решаемой задачи. Типовое количество слотов для сменных модулей - от 8 до 32;
- распределенные (с удаленными модулями ввода-вывода) - в которых модули ввода-вывода выполнены в отдельных корпусах, соединяются с модулем контроллера по сети (обычно на основе интерфейса RS-485) и могут быть расположены на расстоянии до 1,2 км от процессорного модуля.
Многие контроллеры имеют набор сменных процессорных плат разной производительности. Это позволяет расширить круг потенциальных пользователей системы без изменения ее конструктива.
По конструктивному исполнению и способу крепления контроллеры делятся на:- панельные (для монтажа на панель или дверцу шкафа);
- для монтажа на DIN-рейку внутри шкафа;
- для крепления на стене;
- стоечные - для монтажа в стойке;
- бескорпусные (обычно одноплатные) для применения в специализированных конструктивах производителей оборудования (OEM - "Original Equipment Manufact urer").
По области применения контроллеры делятся на следующие типы:- универсальные общепромышленные;
- для управления роботами;
- для управления позиционированием и перемещением;
- коммуникационные;
- ПИД-контроллеры;
- специализированные.
По способу программирования контроллеры бывают:- программируемые с лицевой панели контроллера;
- программируемые переносным программатором;
- программируемые с помощью дисплея, мыши и клавиатуры;
- программируемые с помощью персонального компьютера.
Контроллеры могут программироваться на следующих языках:- на классических алгоритмических языках (C, С#, Visual Basic);
- на языках МЭК 61131-3.
Контроллеры могут содержать в своем составе модули ввода-вывода или не содержать их. Примерами контроллеров без модулей ввода-вывода являются коммуникационные контроллеры, которые выполняют функцию межсетевого шлюза, или контроллеры, получающие данные от контроллеров нижнего уровня иерархии АСУ ТП. Контроллеры для систем автоматизации
Слово "контроллер" произошло от английского "control" (управление), а не от русского "контроль" (учет, проверка). Контроллером в системах автоматизации называют устройство, выполняющее управление физическими процессами по записанному в него алгоритму, с использованием информации, получаемой от датчиков и выводимой в исполнительные устройства.
Первые контроллеры появились на рубеже 60-х и 70-х годов в автомобильной промышленности, где использовались для автоматизации сборочных линий. В то время компьютеры стоили чрезвычайно дорого, поэтому контроллеры строились на жесткой логике (программировались аппаратно), что было гораздо дешевле. Однако перенастройка с одной технологической линии на другую требовала фактически изготовления нового контроллера. Поэтому появились контроллеры, алгоритм работы которых мог быть изменен несколько проще - с помощью схемы соединений реле. Такие контроллеры получили название программируемых логических контроллеров (ПЛК), и этот термин сохранился до настоящего времени. Везде ниже термины "контроллер" и "ПЛК" мы будем употреблять как синонимы.
Немного позже появились ПЛК, которые можно было программировать на машинно-ориентированном языке, что было проще конструктивно, но требовало участия специально обученного программиста для внесения даже незначительных изменений в алгоритм управления. С этого момента началась борьба за упрощение процесса программирования ПЛК, которая привела сначала к созданию языков высокого уровня, затем - специализированных языков визуального программирования, похожих на язык релейной логики. В настоящее время этот процесс завершился созданием международного стандарта IEC (МЭК) 1131-3, который позже был переименован в МЭК 61131-3. Стандарт МЭК 61131-3 поддерживает пять языков технологического программирования, что исключает необходимость привлечения профессиональных программистов при построении систем с контроллерами, оставляя для них решение нестандартных задач.
В связи с тем, что способ программирования является наиболее существенным классифицирующим признаком контроллера, понятие "ПЛК" все реже используется для обозначения управляющих контроллеров, которые не поддерживают технологические языки программирования. Жесткие ограничения на стоимость и огромное разнообразие целей автоматизации привели к невозможности создания универсального ПЛК, как это случилось с офисными компьютерами. Область автоматизации выдвигает множество задач, в соответствии с которыми развивается и рынок, содержащий сотни непохожих друг на друга контроллеров, различающихся десятками параметров.
Выбор оптимального для конкретной задачи контроллера основывается обычно на соответствии функциональных характеристик контроллера решаемой задаче при условии минимальной его стоимости. Учитываются также другие важные характеристики (температурный диапазон, надежность, бренд изготовителя, наличие разрешений Ростехнадзора, сертификатов и т. п.).
Несмотря на огромное разнообразие контроллеров, в их развитии заметны следующие общие тенденции:- уменьшение габаритов;
- расширение функциональных возможностей;
- увеличение количества поддерживаемых интерфейсов и сетей;
- использование идеологии "открытых систем";
- использование языков программирования стандарта МЭК 61131-3;
- снижение цены.
[ http://bookasutp.ru/Chapter6_1.aspx]
Программируемый логический контроллер (ПЛК, PLC) – микропроцессорное устройство, предназначенное для управления технологическим процессом и другими сложными технологическими объектами.
Принцип работы контроллера состоит в выполнение следующего цикла операций:
1. Сбор сигналов с датчиков;
2. Обработка сигналов согласно прикладному алгоритму управления;
3. Выдача управляющих воздействий на исполнительные устройства.
В нормальном режиме работы контроллер непрерывно выполняет этот цикл с частотой от 50 раз в секунду. Время, затрачиваемое контроллером на выполнение полного цикла, часто называют временем (или периодом) сканирования; в большинстве современных ПЛК сканирование может настраиваться пользователем в диапазоне от 20 до 30000 миллисекунд. Для быстрых технологических процессов, где критична скорость реакции системы и требуется оперативное регулирование, время сканирования может составлять 20 мс, однако для большинства непрерывных процессов период 100 мс считается вполне приемлемым.
Аппаратно контроллеры имеют модульную архитектуру и могут состоять из следующих компонентов:
1. Базовая панель ( Baseplate). Она служит для размещения на ней других модулей системы, устанавливаемых в специально отведенные позиции (слоты). Внутри базовой панели проходят две шины: одна - для подачи питания на электронные модули, другая – для пересылки данных и информационного обмена между модулями.
2. Модуль центрального вычислительного устройства ( СPU). Это мозг системы. Собственно в нем и происходит математическая обработка данных. Для связи с другими устройствами CPU часто оснащается сетевым интерфейсом, поддерживающим тот или иной коммуникационный стандарт.
3. Дополнительные коммуникационные модули. Необходимы для добавления сетевых интерфейсов, неподдерживаемых напрямую самим CPU. Коммуникационные модули существенно расширяют возможности ПЛК по сетевому взаимодействию. C их помощью к контроллеру подключают узлы распределенного ввода/вывода, интеллектуальные полевые приборы и станции операторского уровня.
4. Блок питания. Нужен для запитки системы от 220 V. Однако многие ПЛК не имеют стандартного блока питания и запитываются от внешнего.
Рис.1. Контроллер РСУ с коммуникациями Profibus и Ethernet.
Иногда на базовую панель, помимо указанных выше, допускается устанавливать модули ввода/вывода полевых сигналов, которые образуют так называемый локальный ввод/вывод. Однако для большинства РСУ (DCS) характерно использование именно распределенного (удаленного) ввода/вывода.
Отличительной особенностью контроллеров, применяемых в DCS, является возможность их резервирования. Резервирование нужно для повышения отказоустойчивости системы и заключается, как правило, в дублировании аппаратных модулей системы.
Рис. 2. Резервированный контроллер с коммуникациями Profibus и Ethernet.
Резервируемые модули работают параллельно и выполняют одни и те же функции. При этом один модуль находится в активном состоянии, а другой, являясь резервом, – в режиме “standby”. В случае отказа активного модуля, система автоматически переключается на резерв (это называется “горячий резерв”).
Обратите внимание, контроллеры связаны шиной синхронизации, по которой они мониторят состояние друг друга. Это решение позволяет разнести резервированные модули на значительное расстояние друг от друга (например, расположить их в разных шкафах или даже аппаратных).
Допустим, в данный момент активен левый контроллер, правый – находится в резерве. При этом, даже находясь в резерве, правый контроллер располагает всеми процессными данными и выполняет те же самые математические операции, что и левый. Контроллеры синхронизированы. Предположим, случается отказ левого контроллера, а именно модуля CPU. Управление автоматически передается резервному контроллеру, и теперь он становится главным. Здесь очень большое значение имеют время, которое система тратит на переключение на резерв (обычно меньше 0.5 с) и отсутствие возмущений (удара). Теперь система работает на резерве. Как только инженер заменит отказавший модуль CPU на исправный, система автоматически передаст ему управление и возвратится в исходное состояние.
На рис. 3 изображен резервированный контроллер S7-400H производства Siemens. Данный контроллер входит в состав РСУ Simatic PCS7.
Рис. 3. Резервированный контроллер S7-400H. Несколько другое техническое решение показано на примере резервированного контроллера FCP270 производства Foxboro (рис. 4). Данный контроллер входит в состав системы управления Foxboro IA Series.
Рис. 4. Резервированный контроллер FCP270.
На базовой панели инсталлировано два процессорных модуля, работающих как резервированная пара, и коммуникационный модуль для сопряжения с оптическими сетями стандарта Ethernet. Взаимодействие между модулями происходит по внутренней шине (тоже резервированной), спрятанной непосредственно в базовую панель (ее не видно на рисунке).
На рисунке ниже показан контроллер AC800M производства ABB (часть РСУ Extended Automation System 800xA).
Рис. 5. Контроллер AC800M.
Это не резервированный вариант. Контроллер состоит из двух коммуникационных модулей, одного СPU и одного локального модуля ввода/вывода. Кроме этого, к контроллеру можно подключить до 64 внешних модулей ввода/вывода.
При построении РСУ важно выбрать контроллер, удовлетворяющий всем техническим условиям и требованиям конкретного производства. Подбирая оптимальную конфигурацию, инженеры оперируют определенными техническими характеристиками промышленных контроллеров. Наиболее значимые перечислены ниже:
1. Возможность полного резервирования. Для задач, где отказоустойчивость критична (химия, нефтехимия, металлургия и т.д.), применение резервированных конфигураций вполне оправдано, тогда как для других менее ответственных производств резервирование зачастую оказывается избыточным решением.
2. Количество и тип поддерживаемых коммуникационных интерфейсов. Это определяет гибкость и масштабируемость системы управления в целом. Современные контроллеры способны поддерживать до 10 стандартов передачи данных одновременно, что во многом определяет их универсальность.
3. Быстродействие. Измеряется, как правило, в количестве выполняемых в секунду элементарных операций (до 200 млн.). Иногда быстродействие измеряется количеством обрабатываемых за секунду функциональных блоков (что такое функциональный блок – будет рассказано в следующей статье). Быстродействие зависит от типа центрального процессора (популярные производители - Intel, AMD, Motorola, Texas Instruments и т.д.)
4. Объем оперативной памяти. Во время работы контроллера в его оперативную память загружены запрограммированные пользователем алгоритмы автоматизированного управления, операционная система, библиотечные модули и т.д. Очевидно, чем больше оперативной памяти, тем сложнее и объемнее алгоритмы контроллер может выполнять, тем больше простора для творчества у программиста. Варьируется от 256 килобайт до 32 мегабайт.
5. Надежность. Наработка на отказ до 10-12 лет.
6. Наличие специализированных средств разработки и поддержка различных языков программирования. Очевидно, что существование специализированный среды разработки прикладных программ – это стандарт для современного контроллера АСУ ТП. Для удобства программиста реализуется поддержка сразу нескольких языков как визуального, так и текстового (процедурного) программирования (FBD, SFC, IL, LAD, ST; об этом в следующей статье).
7. Возможность изменения алгоритмов управления на “лету” (online changes), т.е. без остановки работы контроллера. Для большинства контроллеров, применяемых в РСУ, поддержка online changes жизненно необходима, так как позволяет тонко настраивать систему или расширять ее функционал прямо на работающем производстве.
8. Возможность локального ввода/вывода. Как видно из рис. 4 контроллер Foxboro FCP270 рассчитан на работу только с удаленной подсистемой ввода/вывода, подключаемой к нему по оптическим каналам. Simatic S7-400 может спокойно работать как с локальными модулями ввода/вывода (свободные слоты на базовой панели есть), так и удаленными узлами.
9. Вес, габаритные размеры, вид монтажа (на DIN-рейку, на монтажную панель или в стойку 19”). Важно учитывать при проектировании и сборке системных шкафов.
10. Условия эксплуатации (температура, влажность, механические нагрузки). Большинство промышленных контроллеров могут работать в нечеловеческих условиях от 0 до 65 °С и при влажности до 95-98%.
[ http://kazanets.narod.ru/PLC_PART1.htm]Тематики
Синонимы
EN
DE
- speicherprogrammierbare Steuerung, f
FR
Англо-русский словарь нормативно-технической терминологии > storage-programmable logic controller
СтраницыСм. также в других словарях:
время работы реле времени — — [Я.Н.Лугинский, М.С.Фези Жилинская, Ю.С.Кабиров. Англо русский словарь по электротехнике и электроэнергетике, Москва, 1999 г.] Тематики электротехника, основные понятия EN timing period … Справочник технического переводчика
Реле времени — Реле времени … Википедия
Реле — (фр. relais) электрическое устройство (выключатель), предназначенное для замыкания и размыкания различных участков электрических цепей при заданных изменениях электрических или неэлектрических входных величин. Различают электрические,… … Википедия
время — 3.3.4 время tE (time tE): время нагрева начальным пусковым переменным током IА обмотки ротора или статора от температуры, достигаемой в номинальном режиме работы, до допустимой температуры при максимальной температуре окружающей среды. Источник … Словарь-справочник терминов нормативно-технической документации
время срабатывания — 3.9 время срабатывания (response time): Интервал времени между отключением исполнительного устройства управления и окончанием выходного сигнала (см. также 9.8). Источник: оригинал документа 1.10. Время срабатывания Промежуток времени между… … Словарь-справочник терминов нормативно-технической документации
Реле — (франц. relais, от relayer cmeнять, заменять) устройство, содержащее Релейный элемент и предназначенное для осуществления скачкообразных изменений состояния какой либо электрической цепи в результате заданных входных воздействий. Обычно… … Большая советская энциклопедия
ГОСТ 16022-83: Реле электрические. Термины и определения — Терминология ГОСТ 16022 83: Реле электрические. Термины и определения оригинал документа: 138. Абсолютная погрешность электрического реле D.Absoluter Fehler Е. Absolute error F. Erreur absolue Определения термина из разных документов: Абсолютная… … Словарь-справочник терминов нормативно-технической документации
синхронизация времени — [ГОСТ Р МЭК 60870 5 103 2005] Также нормированы допустимые временные задержки для различных видов сигналов, включая дискретные сигналы, оцифрованные мгновенные значения токов и напряжений, сигналы синхронизации времени и т.п. [Новости… … Справочник технического переводчика
ФЕРп 2001: Приложения (редакция 2009 г.). Приложения. Федеральные единичные расценки на пусконаладочные работы — Терминология ФЕРп 2001: Приложения (редакция 2009 г.). Приложения. Федеральные единичные расценки на пусконаладочные работы: Автоматизированная система АС Система, состоящая из персонала и комплекса средств автоматизации его деятельности,… … Словарь-справочник терминов нормативно-технической документации
ФЕРп 2001: Общие положения (редакция 2014 г.). Общие положения. Федеральные единичные расценки на пусконаладочные работы — Терминология ФЕРп 2001: Общие положения (редакция 2014 г.). Общие положения. Федеральные единичные расценки на пусконаладочные работы: Автоматизированная система АС Система, состоящая из персонала и комплекса средств автоматизации его… … Словарь-справочник терминов нормативно-технической документации
ФЕРп 2001: Приложения (редакция 2014 г.). Приложения. Федеральные единичные расценки на пусконаладочные работы — Терминология ФЕРп 2001: Приложения (редакция 2014 г.). Приложения. Федеральные единичные расценки на пусконаладочные работы: Автоматизированная система АС Система, состоящая из персонала и комплекса средств автоматизации его деятельности,… … Словарь-справочник терминов нормативно-технической документации
 18+© Академик, 2000-2024
18+© Академик, 2000-2024- Обратная связь: Техподдержка, Реклама на сайте
Экспорт словарей на сайты, сделанные на PHP, Joomla, Drupal, WordPress, MODx.
Перевод: со всех языков на русский
с русского на все языки- С русского на:
- Все языки
- Со всех языков на:
- Все языки
- Английский
- Немецкий
- Русский
- Французский